
excavatorの自律障害物除去に粒子シミュレーションを活用、学習効率を大幅向上
📄 論文サマリー
著者:Yuki Kadokawa、Sandro M. Alcantara Tacora、Taro Abe 他4名
発表:arXiv(ロボティクス)/2606.09183v1
公開日:2026年06月08日
✨ 本論文の新規性
- 粒子シミュレーションを用いた自律障害物除去のポリシー学習フレームワークを提案
- 埋没深さに応じたカーリキュラム学習により、シミュレーションコストと学習時間の両方を削減
- 実機転送が成功し、12トン級の実機 excavator で安定動作を実証
論文の主張: 粒子シミュレーションを用いた自律 excavator の障害物除去技術を提案。埋没深さに応じたカーリキュラム学習により、学習効率を大幅に向上させ、実機転送も成功。

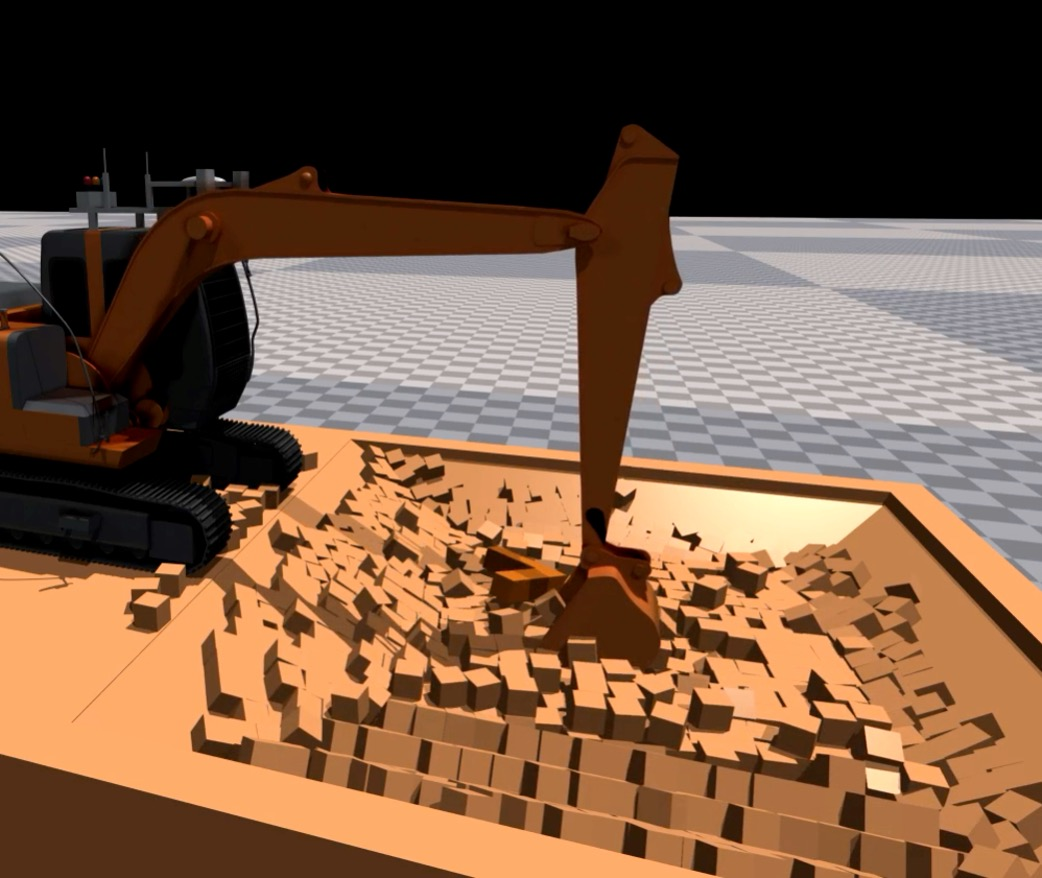
今回の論文は、粒子シミュレーションを活用した自律型の障害物除去技術についてです。 excavator の.bucket が土を掘りながら障害物を除去する際、その状況に応じて適応的に軌道を調整するよう学習させています。

なるほど、 excavator が土を掘る際の動きをシミュレーションで学習するってことですね。
はい、その通りです。特に、障害物の埋め込み深さによってシミュレーションの複雑さや計算コストが変化する点を意識して、教える順序を工夫した「カーリキュラム学習」を導入しています。
あ、なるほど。つまり、浅く埋まった障害物から学習して、徐々に深く埋まったものに挑戦していくってことですか?
そうです。この手法では、シミュレーションの粒子数を調整しながら、埋め込みの深さを段階的に増やすことで、学習効率を高めています。これにより、数日で高精度なポリシーが学習できるという結果が出ています。
それは実用的ですね。ただ、実際の excavator に適用するには、シミュレーションと現実の間のギャップってあるんでしょうか?
その点についても、RGB-D センサーからの観測と、 excavator の行動を共有するインターフェースを用いて、シミュレーションと実機の間で直接移行できるようにしています。
なるほど。これって、技術的なハードルが高いですよね?現場で導入するには、設備投資や訓練のコストがかかるんでしょうか?
研究では、12トン級の excavator で成功を確認しています。ただし、実際の現場での導入には、コストや運用の複雑さ、そして地域の条件なども考慮が必要です。
そうですね。補助金の導入が前提になるケースもあるでしょうし、規模感が大きいとROIの見通しが立たないかもしれませんね。
その通りです。特に、大規模な土木工事や埋立地の整理など、広範囲で障害物が存在する場面では、効果が期待できる可能性があります。
実験結果、かなりの精度が出たってことですよね。でも、これって、他の機械や現場に応用できる可能性も出てきそうですね。
はい、このフレームワークは、特定の機械に限定されず、他のロボットや用途にも応用できる可能性があるとされています。
それは面白いですね。ただ、実際の現場では土の性質が変化したり、障害物の種類もさまざまなので、適応性が鍵になりそうですね。
まさにその通りです。土の性質や地形の変化などに柔軟に対応できるように、学習の柔軟性や汎化能力も重要になってきます。
背景と課題
土木作業における障害物除去は、 excavator が複数回の掘削サイクルを繰り返しながら、土壌と障害物の接触状態を適応的に処理する必要があるため、自動化が難しい。従来手法では、解析モデルや連続体モデルが使われていたが、局所的な接触や崩壊を再現しきれなかった。粒子シミュレーションはこれに対応可能だが、計算コストが高く、学習に時間がかかる。
手法・アプローチ
提案手法では、RGB-Dセンサによる観測と、4次元の掘削パラメータ(位置、深さ、距離)を出力するポリシーを用いる。粒子シミュレーション環境では、障害物の埋没深さに応じてシミュレーションの粒子数を調整するカーリキュラム学習を導入。これにより、学習初期は低コストで簡単なタスクから学習し、徐々に複雑な状況へ移行する。
実験結果
粒子シミュレーションでの実験では、従来手法と比較して3日以内に90%以上の成功率を達成。実機転送実験では、12トン級の excavator で安定動作を確認。学習時間は従来手法の1/7程度で、効率性が大幅に向上した。

意義・応用可能性
この技術は、土木作業現場の自動化に大きく貢献する可能性がある。特に、複雑な地形や埋没障害物に対応できる自律 excavator の開発が期待される。日本では、山間部や都市部の地下設備整備など、複雑な作業環境での活用が考えられる。
限界と今後の課題
本手法は、障害物の形状や材質に依存するため、汎用性に課題がある。また、実機とシミュレーションのギャップを完全に解消するには、より高精度なシミュレーションモデルや、リアルタイムでの環境適応機構が必要である。
日本での適用可能性
日本では、山間部の建設や都市部の地下整備など、複雑な地形での作業が増加している。本技術は、これらの現場で、労働力不足や安全性の向上に寄与する可能性がある。特に、災害時の応急工事など、人間が行えない作業にも応用できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Autonomous Obstacle Removal for Excavators through Policy Learning with Particle Simulation – 著者: Yuki Kadokawa, Sandro M. Alcantara Tacora, Taro Abe, Daisuke Endo, Genki Yamauchi, Takeshi Hashimoto, Takamitsu Matsubara – 発表日: 2026-06-08 – arXiv ID: 2606.09183v1 – カテゴリ: cs.RO