
垂直撮影動画における野馬の正確な追跡:OBBを活用した頭部方向推定手法
📄 論文サマリー
著者:Saeko Takizawa、Tamao Maeda、Shinya Yamamoto、Hiroaki Kawashima
発表:arXiv(コンピュータビジョン)/2603.03604v1
公開日:2026年03月04日
✨ 本論文の新規性
- 従来のYOLO-OBBの180度制限を回避するため、頭部方向を推定する新しい手法を提案
- 複数の検出モデルを用いた多数決方式により、頭部位置の推定精度を99.3%に向上
- 追跡精度向上のため、Kalmanフィルタに360度回転情報を統合した拡張SORT手法を適用
論文の主張: 垂直撮影された野馬の動画において、Oriented Bounding Box(OBB)を用いた頭部方向推定手法により、高精度な個体追跡を実現。特に、回転する個体の追跡において従来手法より安定性が向上。

今回は、feral horse(野生馬)の追跡に向けた新しい手法について紹介します。この研究では、航空写真を用いたオブジェクト検出において、従来のbboxではなくOBB(oriented bounding box)を活用し、追跡精度を高める方法が提案されています。

なるほど、航空写真を用いるって、農業の現場でも結構使われてるんですけど、この手法は精度の面でどう違うんですか?
その点について、OBBの特徴を説明すると、通常のbboxは軸に沿った矩形ですが、OBBは回転角を考慮した矩形で、動物が向きを変えてもその形状をより正確に捉えられます。特に、空中から撮影する際の小動物の追跡には効果的です。
あ、なるほど。でも、角度の範囲を180度に制限してるYOLO-OBBって、それだと頭と尻尾が区別できないってことですか?
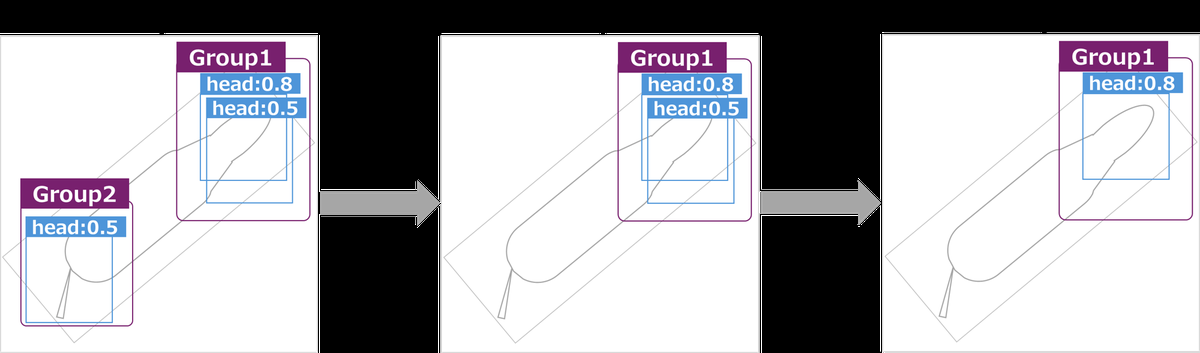
その通りです。研究では、頭の向きを推定するための手法として、OBBの中心にパッチを切り取り、その領域に頭・尻尾・両方を検出する3つのモデルを用いて、IoUベースの多数決で最終的なラベルを決定しています。
えっ、それって結構精度高いんでしょうか?
実験結果によると、99.3%の精度を達成しており、個々のモデルを上回る性能を示しています。この精度は、追跡の連続性を保つうえで非常に重要です。
コスト的にも、その精度で運用できるんでしょうか?
この研究では、実際の運用コストについては触れていませんが、技術的には精度向上が実現できているため、効率的な追跡が可能になる可能性はあります。
一方で、農業現場では規模や環境の違いが結構あるんですけど、これって広範囲に適用できるんでしょうか?
それは、動物の種類や視点の違い、背景の複雑さなどによって影響を受けます。研究では、特定の馬の集団を対象としていますが、他の群れや種類にも応用できる可能性はあります。
補助金とかの制度が絡むと、導入の判断が難しそうですね。
はい、補助金前提の導入も考えられますが、技術の成熟度や運用コストの問題も考慮する必要があります。
でも、この精度が出るなら、将来的には自動化の選択肢として広がるかもしれませんね。
そうですね。今後は、より多くの動物や複雑な環境での試験が進むと期待されます。技術の進歩と共に、農業現場での活用も広がっていきそうです。
背景と課題
群れ生活する動物、特に野馬の社会構造を理解するためには、個体の動きを追跡し、個体間の相互作用を分析することが重要です。従来、ドローンによる垂直撮影動画を用いた追跡が広く用いられていますが、個体が回転し、背景が複雑な場合、従来の軸対応境界ボックス(bbox)では精度が低下します。特に、野馬の個体が異なる方向を向いている場合、180度の回転範囲に制限されたOBB検出器では、頭と尾の区別が困難になり、追跡の連続性が損なわれます。
手法・アプローチ
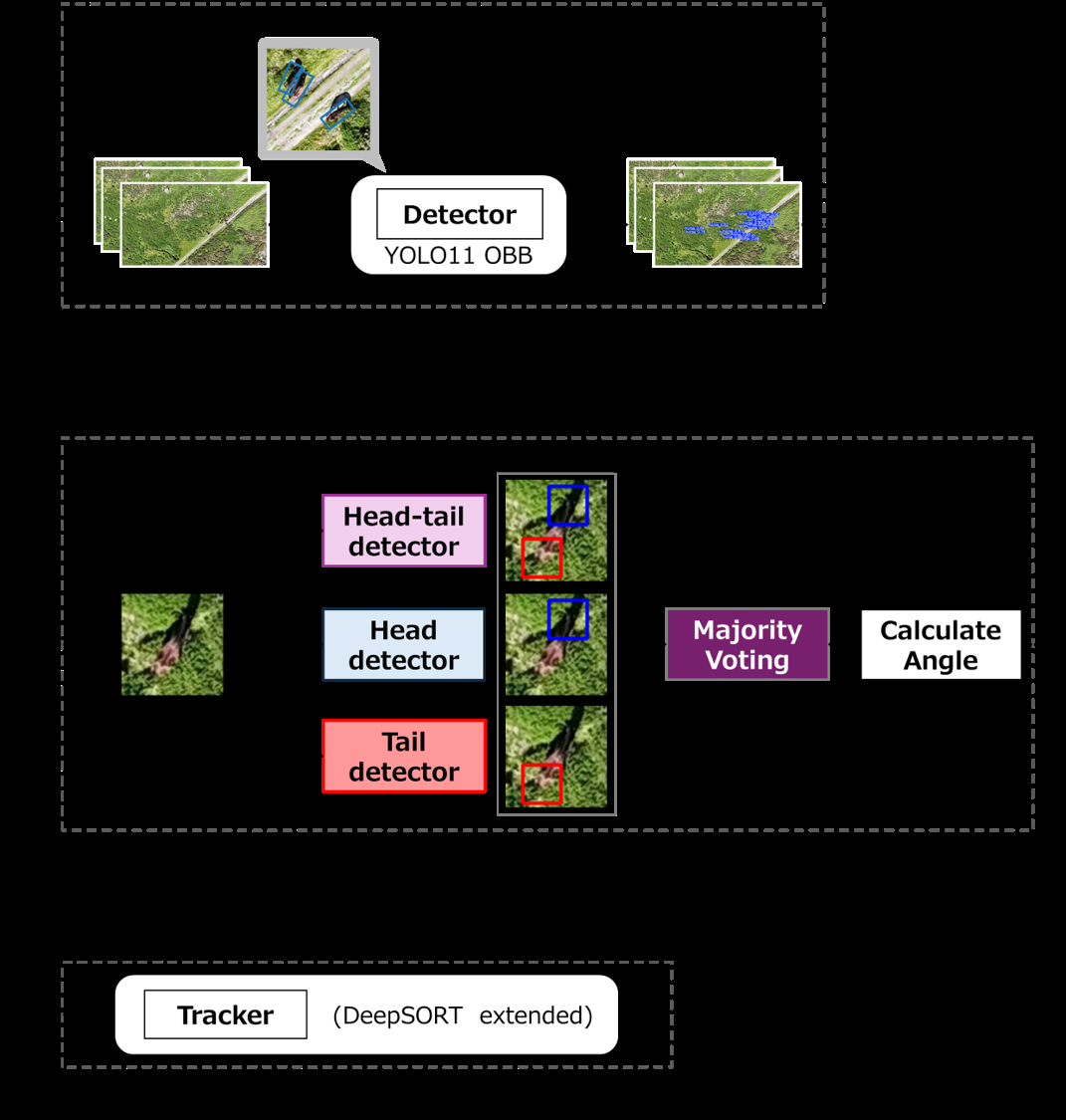
本研究では、OBBを用いた個体検出から頭部と尾部の位置を推定し、その情報をもとに頭部方向を推定する手法を提案します。具体的には、YOLO11m-OBBモデルを用いて全体の個体を検出し、各個体の中心に近い領域を切り取り、頭部・尾部・頭尾の3つの検出器を用いて位置を推定します。推定結果はIoUベースの多数決方式で統合され、最終的に360度の回転角度を算出します。この角度情報を用いて、拡張されたDeepSORTに基づく追跡アルゴリズムを適用します。
実験結果
299枚のテスト画像を用いた評価において、提案手法は頭部位置推定の精度を99.3%(297/299)で達成しました。これは、単一の検出器(頭部、尾部、頭尾)よりも高い精度を示しており、多数決方式の有効性を確認できます。また、追跡結果では、OBBの方向が安定しており、個体の移動方向が変化しても追跡が継続されることを確認しました。
意義・応用可能性
本手法は、野馬の社会行動の分析に有用であり、特に群れの動態や個体間の相互作用を定量的に評価する際に重要です。ドローンによる垂直撮影が広く普及する中で、高精度な個体追跡技術は農業や動物保護分野においても応用が期待できます。例えば、野生動物の管理や保護区域での個体の行動分析などに活用可能です。
限界と今後の課題
本手法は、個体が非常に近距離にいる場合や、個体の形状が類似している場合に誤検出が発生する可能性があります。また、Kalmanフィルタの状態更新において、誤った頭部方向推定が直接追跡に影響を与えるケースも見られました。今後の課題として、より堅牢な追跡フレームワークの導入や、OBBの方向推定精度のさらなる向上が挙げられます。
日本での適用可能性
日本では、野生動物の管理や保護区域での動物行動観察が重要視されています。本手法は、ドローンによる垂直撮影を活用した動物追跡に適しており、特に野馬や鹿などの群れ生活する動物の行動分析に応用が可能です。農業現場での動物の移動パターンの把握にも役立つ可能性があります。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Tracking Feral Horses in Aerial Video Using Oriented Bounding Boxes – 著者: Saeko Takizawa, Tamao Maeda, Shinya Yamamoto, Hiroaki Kawashima – 発表日: 2026-03-04 – arXiv ID: 2603.03604v1 – カテゴリ: cs.CV