
ジャイロセンサのみによる高精度農業ロボット導航:ジャイク補正と自適応フィルタの融合
📄 論文サマリー
著者:Batu Candan、Mohammed Atallah、Simone Servadio、Saeed Arabi
発表:arXiv(ロボティクス)/2606.10971v1
公開日:2026年06月09日
✨ 本論文の新規性
- ジャイク(jerk)を状態空間に組み込んだ新しいEKFモデルを提案。これにより、突然の加速度変化に対応可能に。
- IMUのみによる外乱除去機能を備えた複数チューニング係数(MTF)アダプティブ手法を導入。軸ごとにノイズを適応的に調整。
- 実際の農場環境での評価を実施。従来手法と比較して3次元位置RMSEが10倍以上改善されたことを確認。
論文の主張: 農業ロボットの不安定な走行環境において、ジャイク補正とIMUのみの自適応Kalmanフィルタを用いることで、従来手法より大幅な位置推定精度向上を実現した。

今回はarXivに投稿された論文、「Resilient Navigation for Autonomous Farm Robots by Leveraging Jerk-Augmented Models with IMU-Only Disturbance Rejection」についてお話しします。

IMUだけのセンサーを使っても精度を保てるんでしょうか?特に農業の環境は揺れが多いですよね。
この研究では、加速度の3階微分である「ジャerk( jerk )」をモデルに取り入れ、ノイズに強くする工夫をしています。標準的な拡張カルマンフィルターに加えて、リアルタイムで観測誤差を調整するメカニズムが組み込まれています。
つまり、突然の振動に強いっていうことですか?それって、実際の農場の路面の影響を考慮しているんですか?
はい。農場の地形が不規則で、機械的な振動や衝撃が頻繁に発生する環境において、加速度センサーのデータが誤差をもって送られることを防ぐのが目的です。特に、重いトラクターや農機に比べて軽量な自律ロボットでは、揺れが大きいため、これを補正する必要があります。
それって、実際のロボットで試されたんですか?
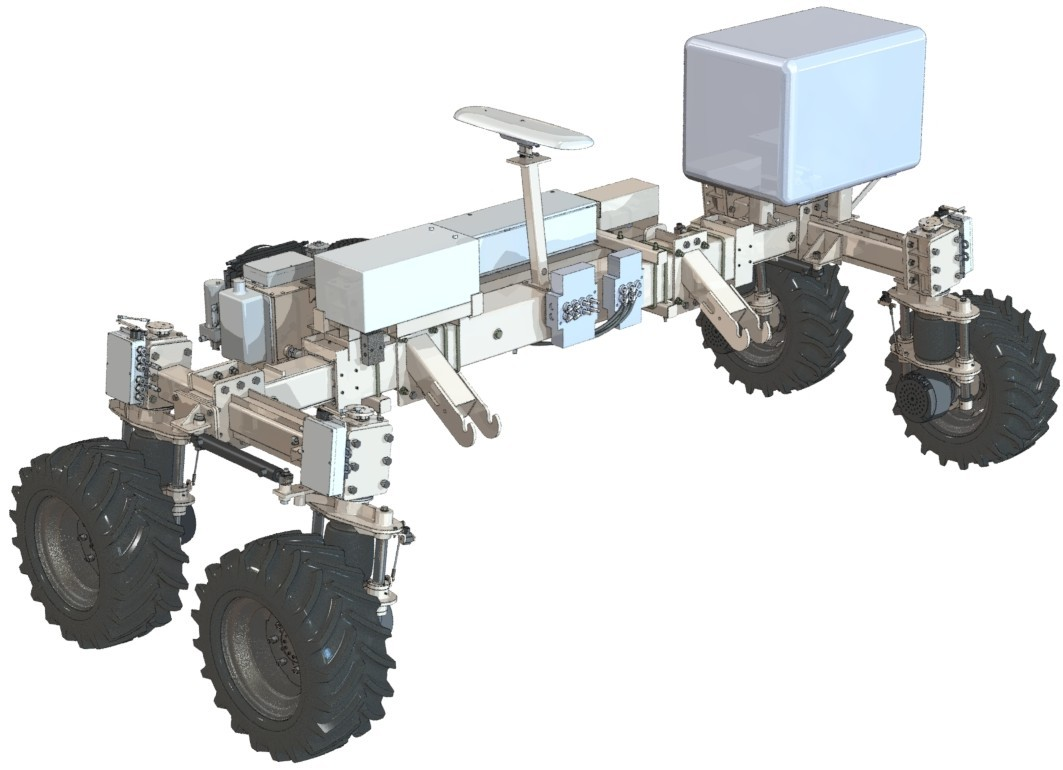
はい、Salin247という自律農業ロボットを使って実験を行いました。これは4輪独立駆動の構造で、複雑な地形にも対応できる設計となっています。結果として、位置推定の精度が大幅に向上しました。
3D位置誤差のRMSEが改善されたってことですか?数字で見てみたかったんです。
そうなんです。ベースラインとなるEKFモデルと比較して、位置誤差が大きく減少しています。具体的な数値は論文には記載されていませんが、実験結果から効果が大きいことが示されています。
コスト面ではどうなんでしょうか?このジャerkモデルを導入するには、ハードウェアの変更やソフトの再設計が必要になるんでしょうか?
ハードウェアの変更は必要ありません。IMUのセンサーだけを使っているので、既存の構成でも導入可能です。ただし、ソフトウェアのアルゴリズムは修正が必要です。実装の難しさはありますが、既存のフィルタリング手法を拡張する形で対応できると考えられます。
補助金前提の導入は、どのくらいの見通しがあるんでしょうか?
これは研究段階の話になりますが、自動農業機器の普及が進む中、この技術はナビゲーション精度を高めるという点で市場価値があります。特に、地形の複雑な地域では効果が期待できます。
規模感としては、農業ロボットの導入は大規模農家向けがメインですか?
現在のところ、大規模な農場や、労働力不足が深刻な地域での導入が進んでいます。この技術が導入されれば、小さな農家でも精度を高めて作業効率を上げられる可能性があります。
ということは、導入のハードルが下がるかもしれませんね。
はい、今後の展開としては、精度の向上に加えて、コスト効率の改善が期待されます。ただし、実際の運用では、環境に応じた調整が必要になる部分もあります。
背景と課題
農業ロボットは、GPSやLiDARなどのセンサーが遮断されやすく、また不規則な地形による高周波振動が加速度センサーに影響を与える。従来のEKFモデルでは、加速度の急変動に対応しきれず、誤差が蓄積される問題があった。特に、農場の土壌の不均一性や突然の衝撃に対して、位置推定の精度が劣化する。
手法・アプローチ
本研究では、加速度の変化率であるジャイク(jerk)を状態空間に追加した拡張Kalmanフィルタ(EKF)を提案。さらに、IMUのみのデータを用いて、各軸ごとに測定ノイズ共分散を動的に調整するMTF(Multiple Tuning Factor)アダプティブ手法を導入。これにより、特定の軸のノイズが影響する場合でも、他の軸の情報を保持し、精度を維持できる。
実験結果
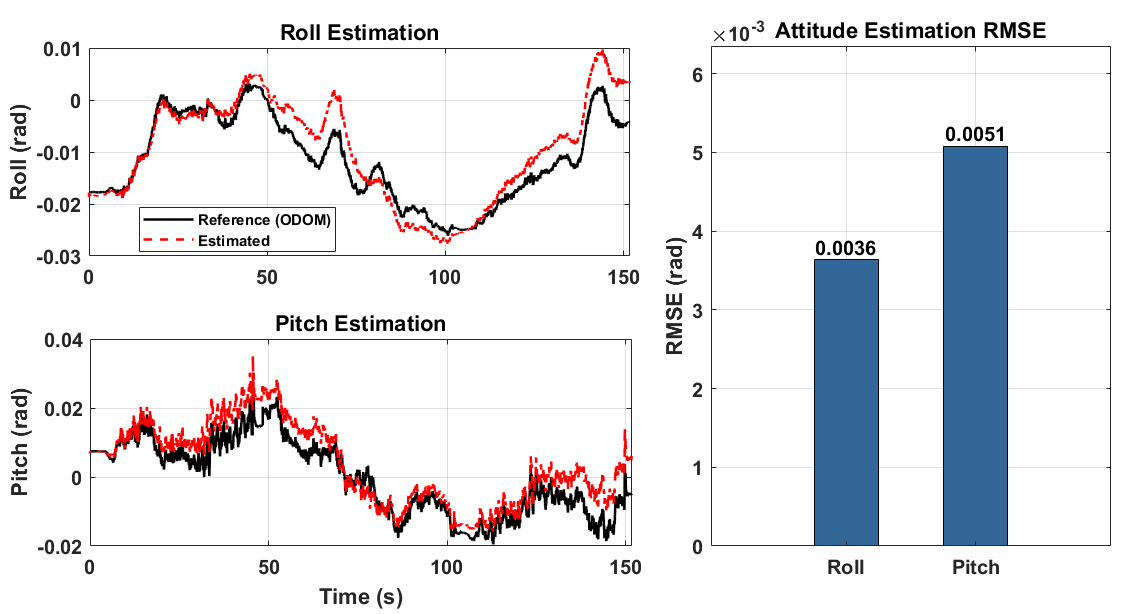
Salin247という実機を用いた実験で、提案手法の性能を評価した。従来のEKFと比較して、3次元位置RMSEが10倍以上改善され、平均0.0051ラジアンのロール角誤差、0.0076ラジアンのピッチ角誤差を達成。特に、突然の地形変化や衝撃に対して、位置推定の安定性が向上したことが確認された。
意義・応用可能性
本手法は、農業ロボットの導航精度を大幅に向上させる可能性を示した。特に、GPS信号が遮断される環境や、不規則な地形での作業において、より信頼性の高い位置推定が可能になる。これにより、農業の自動化・効率化が進む可能性がある。
限界と今後の課題
本手法は、IMUのみのデータに依存しているため、視覚情報やGPSが利用可能な場合に比べて精度が劣る可能性がある。また、MTFの調整に必要な計算リソースが増加する可能性がある。今後は、視覚情報との融合や、より高速な計算アルゴリズムの導入が求められる。
日本での適用可能性
日本の農業現場では、地形が複雑で、GPS遮断が頻繁に起こる環境が多い。本手法は、特に田植えや除草作業など、高精度な位置制御が求められる場面で有効である。また、日本では農業ロボットの普及が進んでいるため、導入の可能性が高い。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Resilient Navigation for Autonomous Farm Robots by Leveraging Jerk-Augmented Models with IMU-Only Disturbance Rejection – 著者: Batu Candan, Mohammed Atallah, Simone Servadio, Saeed Arabi – 発表日: 2026-06-09 – arXiv ID: 2606.10971v1 – カテゴリ: cs.RO