
宇宙船の6D姿勢推定に向けた、照明を考慮したViTアーキテクチャ
📄 論文サマリー
著者:Zongwu Xie、Yifan Yang、Yonglong Zhang 他3名
発表:arXiv(コンピュータビジョン)/2606.11619v1
公開日:2026年06月10日
✨ 本論文の新規性
- 照照明と構造情報を分離するPAID-ViTモデルを提案し、空間的不確実性を考慮した姿勢推定を実現
- 精度に応じたトークン重み付け機構(PAUP)を導入し、信頼性の低い画像領域の影響を軽減
- マスク监督と幾何学的回復モジュールを組み合わせ、背景干渉や照照明変化に強い姿勢推定を可能に
論文の主張: 宇宙船の姿勢推定において、照照明の影響を抑えるための新しいVision Transformerアーキテクチャを提案。特に太陽光による影や反射が強い環境でも安定した推定が可能。

今回の話題は、2026年6月にarXivに公開された論文で、Spacecraftの6D姿勢推定に関するものです。タイトルは『Precision-Aware Illumination-Disentangled Vision Transformer for Spacecraft 6D Pose Estimation』です。

なるほど、宇宙機の姿勢推定って、つまり空間での位置と向きを正確に知ることですね。それって、着陸や docking にすごく重要なことなんですか?
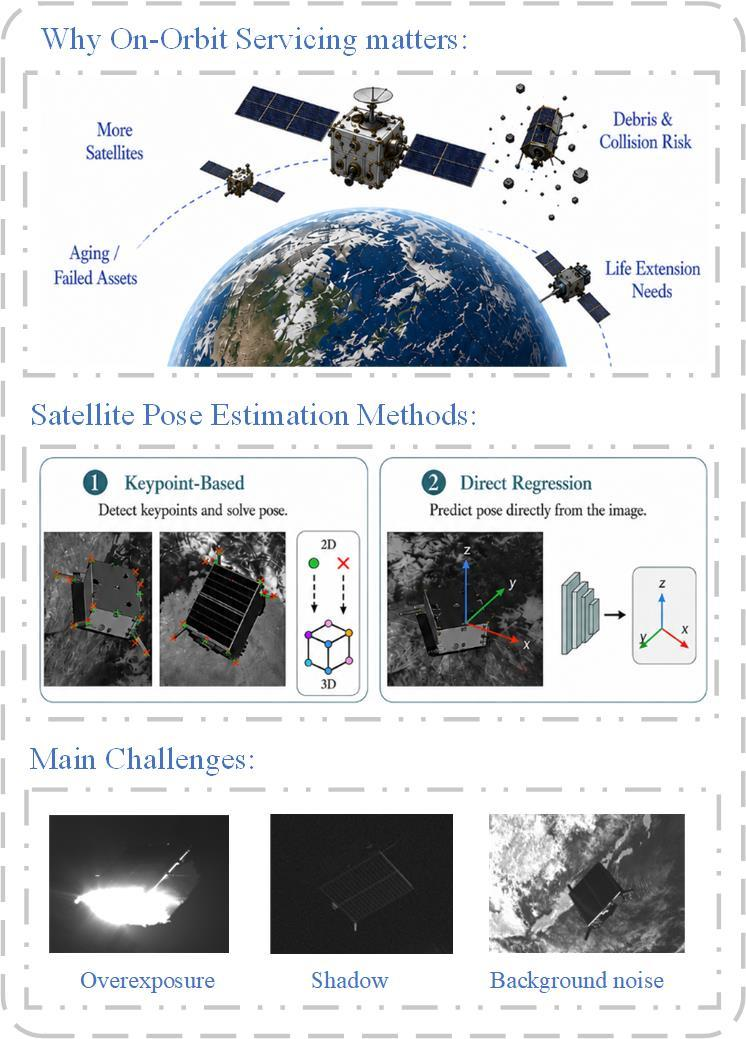
はい、その通りです。特に近地軌道上でのオービットサービスや、故障機の回収など、空間機同士の接近や接触に際しては、正確な姿勢推定が不可欠です。特に、太陽光の影響や反射が大きく、画像の信頼性が低い状況下でも推定できるようにする必要があります。
そうですね、地球の空気の影響や雲、あるいは太陽の位置によって、写真の明るさが変わるって、私たちの農業でも同じような問題あるかもしれませんね。
まさにその通りです。この論文では、視覚的な特徴を照明に依存しない形で分離する手法を採用しています。特に、画像の一部が反射や影で情報が壊れている場合でも、モデルがそれらを識別し、信頼性の高い部分だけを重視するよう設計されています。
それは技術的にすごいですね。ただ、実際の運用でコストがどうなるのか、ちょっと気になります。研究の段階ではあるけど、実機に導入するには、どのくらいの初期投資が必要になるんでしょうか?
このモデルは、特にカメラの画像処理に特化しており、論文ではパラメータの少ない幾何復元モジュールを用いることで、計算負荷を抑えています。しかし、ハードウェアとソフトの統合には、運用コストやメンテナンスの視点も必要です。
なるほど、ハードのコストがどうなるかはまた別の話になるんでしょうかね。それにしても、この研究は照明の影響を無視できない空間環境に特化しているから、他の分野にも応用できるかもしれませんね。
それは興味深いですね。論文では、照明と構造の分離をすることで、より安定した姿勢推定が可能になることが示されています。これは、衛星の画像解析だけでなく、ロボット視覚や自動運転車の分野でも応用が期待できます。
そうですね、画像をどう扱うかが鍵になるんでしょうか。このモデル、実際の画像データを元に学習して、精度がどのくらい上がるのか、ちょっと気になります。
論文では、SPEED+というデータセットを使って評価が行われています。このデータセットは、合成画像、ライトボックス、そして太陽光を模擬した条件を含む、異なる照明環境での推定性能を比較するもので、結果として、このモデルは太陽光条件での精度向上が確認されています。
あ、それはとても重要なポイントですね。実際の空間では、太陽の角度が変化するので、照明条件が常に変わるってことですね。このモデルがその変化に柔軟に対応できるのは、大きな利点だと思いました。
はい、その通りです。照明の影響を分離することで、画像の質の高い部分を重点的に利用できるようになるため、安定した推定が可能になります。この技術が空間分野でどう進化していくか、今後の動向が楽しみです。
今後の展開、楽しみですね。この研究は、技術的にも応用範囲も広いので、他の分野にも活かせる可能性があると思います。
背景と課題
宇宙船の近接操作やサービス作業において、視覚センサーによる姿勢推定は重要だが、金属表面や太陽光による反射、影、背景干渉などにより、画像の局所情報が信頼性が低くなる。従来手法では、照照明の変化に弱く、推定精度が低下する問題があった。
手法・アプローチ
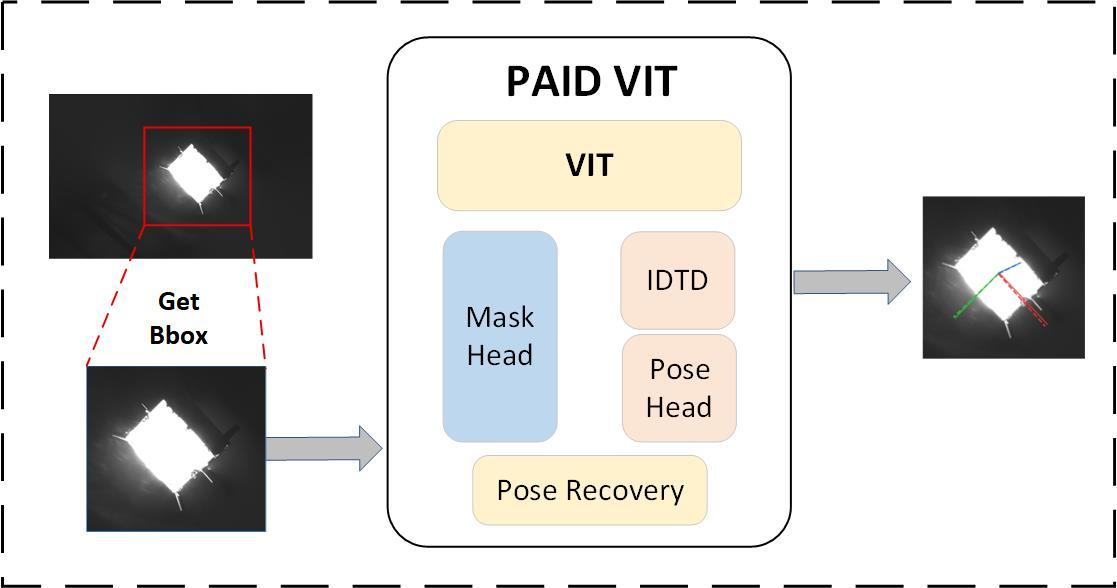
本研究では、精度に応じたトークン重み付け機構(PAUP)と照照明分離機構(IDTD)を組み込んだPAID-ViTモデルを提案。ViTの出力から構造トークンと照照明トークンを分離し、信頼性の低い領域の影響を抑える。さらに、マスク监督と幾何学的回復モジュールにより、姿勢推定の安定性を高めた。
実験結果
SPEED+ V2データセットでの評価結果、PAID-ViTは太陽光環境下での推定誤差が従来手法と比較して大幅に低減。特に移動方向の誤差(translation error)が改善され、全体的な姿勢推定精度が向上した。また、アブレーション実験により各モジュールの有効性が確認された。
意義・応用可能性
本手法は、宇宙船の自動近接・ドッキング、衛星の在軌サービスなど、高精度な姿勢推定が求められる分野に応用可能。特に、太陽光による照照明変化が激しい環境下でも安定した推定が可能であり、宇宙開発の安全性向上に寄与する。
限界と今後の課題
本手法は、特定の環境(太陽光)に特化した評価のみであり、他の宇宙環境(例:月面、小惑星)への適用性は未検証。また、マスク推定の精度に依存するため、より高精度な前景推定モデルとの統合が今後の課題である。
日本での適用可能性
日本の宇宙開発プロジェクト(例:JAXAの衛星サービス)において、本手法は宇宙船の自動近接や在軌補修作業の精度向上に貢献できる。特に、太陽光による照照明変化が問題となる環境での姿勢推定に有効と期待される。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Precision-Aware Illumination-Disentangled Vision Transformer for Spacecraft 6D Pose Estimation – 著者: Zongwu Xie, Yifan Yang, Yonglong Zhang, Guanghu Xie, Yang Liu, Shuo Zhang – 発表日: 2026-06-10 – arXiv ID: 2606.11619v1 – カテゴリ: cs.CV