
ワイヤー駆動で環境を活用する新ロボットWiXus、農業現場での活用が期待
📄 論文サマリー
著者:Shintaro Inoue、Kento Kawaharazuka、Temma Suzuki、Sota Yuzaki、Kei Okada
発表:arXiv(ロボティクス)/2605.20932v1
公開日:2026年05月20日
✨ 本論文の新規性
- ワイヤー駆動と車輪脚ロボットを統合し、環境を活用して移動と操作を同時実現
- 車輪脚の足をワイヤーで吊るすことで、通常の足の機能を操作に転用可能に
- ドローンによる自動アンカー設置機能を搭載し、自律的な環境利用が可能
論文の主張: WiXusは、ワイヤー駆動により環境を活用し、車輪脚ロボットの移動性と操作性を統合。崖登りや物体運搬、ツール使用など、従来のロボットでは困難な作業を実現。

今回は、arXivに掲載された論文「WiXus: A Wheeled-Legged Robot with Wire-Driven Environmental Utilizing to Integrate Mobility and Manipulation」を取り上げます。

なるほど、ロボットの足を活用して移動と操作を両立させるってことですね。
はい、このWiXusは、普通の足で移動するだけでなく、環境にワイヤーをかけて体を支えることで、足を腕のように使うことができるロボットです。
えっ、ワイヤーで体を支えるって、空中に浮かぶようなイメージですか?
そうです。このロボットは、地面にワイヤーを張って体を支えることで、足を操作用の腕として活用します。
なるほど、それはちょっと想像以上ですね。足の使い方が変わるって、技術的にも面白いですね。
この研究では、ロボットの体の構造を工夫して、移動と操作の両方に対応しています。
コストや運用の面ではどうなんでしょう?
その点については、論文ではまだ具体的な数値は出ていませんが、ワイヤーを環境に锚定することで、移動効率を高められるという点がポイントです。
それって、現地の構造物に依存するってことですね。
はい、まさにその通りです。環境の構造物にワイヤーを張る必要があり、これは実際の運用上、限界があるかもしれません。
あ、それと、農業現場では地形が複雑なことが多くて、このワイヤーの活用が難しいかもしれませんね。
そうですね。この技術は、地形の変化が少ない場所や、構造物が豊富な環境に適していると考えられます。
それって、補助金前提の導入になるかもしれないですね。
その通りです。特に初期投資が大きい技術には、補助金の影響が大きい傾向があります。
この技術、今後の展開、どう思われますか?
このロボットは、農業の自動化にも応用できる可能性があると思います。
それは、農業の労働力不足を補う可能性もあるんですね。
はい。しかし、現場での実運用には、環境依存性やコストの問題が伴うため、慎重な導入が必要です。
やはり、技術の進歩と現場の現実のバランスが必要ですね。
今回のWiXusの研究は、ロボットの使い方を一変える新しいアプローチを示しており、今後の応用が広がるかもしれません。
背景と課題
従来の車輪脚ロボットは、平坦な地面では高速移動が可能だが、崖や垂直壁など高所への移動が困難であった。特に農業現場では、屋外での作業や複雑な地形での移動が求められるため、従来のロボットでは限界があった。WiXusは、ワイヤー駆動により環境を活用することで、これらの課題を解決する。
手法・アプローチ
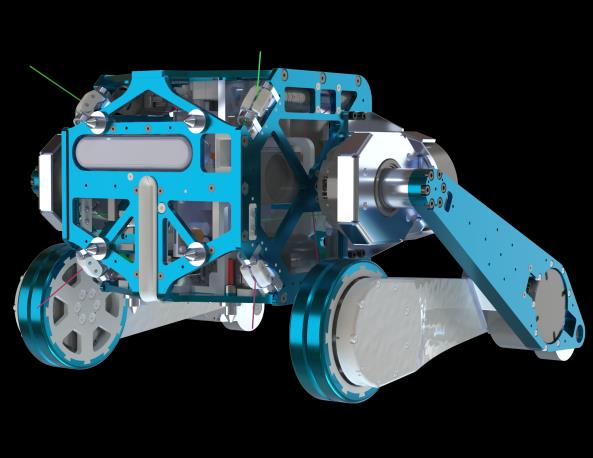
WiXusは、車輪脚機構とワイヤード駆動機構を統合したロボット。車輪脚は移動に使用し、ワイヤーは周囲の構造物に固定してロボットを吊るすことで、足を操作用アームとして再利用可能に。ワイヤーは4本で環境固定、1本でツールを付ける構造。ドローンによる自動アンカー設置機能も搭載。

実験結果
WiXusは崖の登り、物体の運搬、ツール(リーパー)を使った果物の収穫など、複数の作業を実施。崖登りでは、2本のワイヤーを木の枝に固定し、車輪とワイヤーを連動させて移動。物体運搬では、2本のワイヤーで吊るした状態で、車輪脚を操作して犬型の stuffed animal を運搬。収穫実験では、650mmのリーパーをワイヤーで固定し、操作してリンゴを摘む作業を成功。
意義・応用可能性
WiXusは、屋外での農業作業に強い。崖や高所への移動が可能であり、農場の広範囲を効率的に巡回・作業できる。特に、屋外での自律移動と操作が可能なロボットとして、災害時の救助や農作業の自動化に応用が期待できる。日本では、山間部や複雑な地形での農作業支援に活用が可能。
限界と今後の課題
現在のWiXusは、ワイヤーの制御周波数が低く、動きに振動が生じる。また、ドローンによる自動アンカー設置は、環境の複雑さに依存するため、精度向上が求められる。さらに、操作の自動化や、より多様なツールの対応も今後の課題。
日本での適用可能性
日本では、山間部や斜面の農地での作業が多いため、WiXusの崖登りや屋外移動能力が非常に有用。特に、災害時の救助や、高所での作物管理、自動収穫など、農業の自動化・効率化に貢献できる。また、屋外での自律移動が可能なので、農業ロボットの普及に大きく貢献する可能性がある。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: WiXus: A Wheeled-Legged Robot with Wire-Driven Environmental Utilizing to Integrate Mobility and Manipulation – 著者: Shintaro Inoue, Kento Kawaharazuka, Temma Suzuki, Sota Yuzaki, Kei Okada – 発表日: 2026-05-20 – arXiv ID: 2605.20932v1 – カテゴリ: cs.RO