
ドローンの遠距離距離推定に革命をもたらすDroneDARモデルの登場
✨ 本論文の新規性
- ドローンの遠距離推定において、画像とバウンディングボックスの特徴を統合した新しいモデルDroneDARを提案
- ResNetベースのバックボーンと軽量なバウンディングボックス特徴ゲートを導入し、精度向上を実現
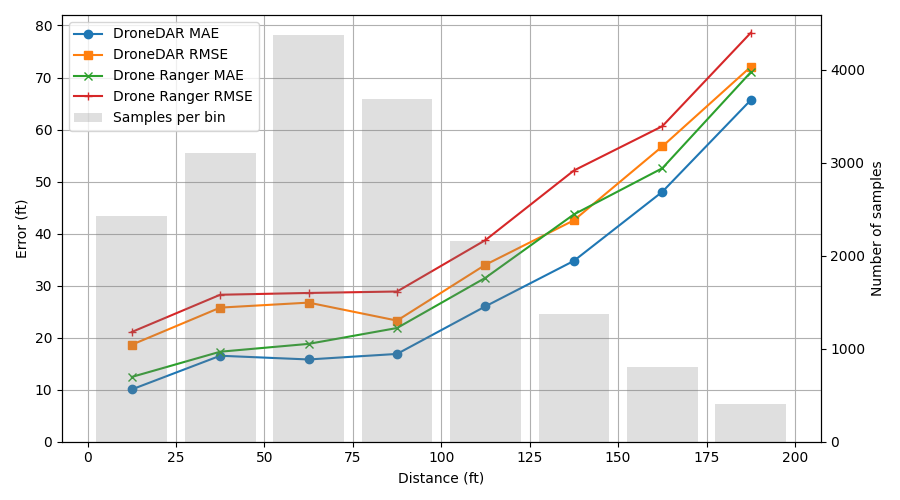
- 従来のDronerangerモデルと比較して、MAEが3.56フィート、RMSEが2.18フィート改善
論文の主張: 遠距離でのドローン検出と距離推定を目的とした新しいモデルDroneDARを提案。画像とバウンディングボックスの特徴を統合することで、従来技術より精度が向上。

今回の論文は、ドローンの遠距離画像から距離を推定する手法についてです。画像のクロップとバウンディングボックスの特徴を組み合わせたモデルを提案しています。

なるほど、画像から距離を出すって、意外と難しいんでしょうか?
そうです。特に遠距離では、ドローンが画像に占める領域が非常に小さく、背景の雑音や視覚的 cues が弱いと、正確な距離推定が困難になります。この論文では、バウンディングボックスの情報をモデルに組み込むことで精度を上げる試みです。
それって、画像の解像度とバウンディングボックスの精度が大きく影響するんでしょうか?
はい、その通りです。特に、解像度が低かったり、ボックスの精度が悪いと、距離の推定が不安定になる傾向があります。また、データセットのバランスやノイズの影響も大きいです。
それって、実運用で安定して使えないんでしょうか?
現状では、ドローンの検出と距離推定の両方が必要な環境において、まだ限界がある部分があります。特に、ドローンが画像にほとんど見えないような極めて遠距離の状況では、精度が落ちる傾向があります。
なるほど、それって、衛星画像やドローンの監視システムなどでも使えるんでしょうか?
衛星やドローンの監視システムの分野では、確かに応用の可能性はあります。特に、ドローンが広域に飛んでいるときの追跡や、安全確保のための距離推定が求められる場面では活用が期待できます。
コストとROIはどのくらい考えられているんですか?
この研究は、技術的な側面に重きを置いており、コストやROIについては触れていません。ただ、ドローンの遠距離距離推定の精度を上げるためには、ハードウェアやデータの質の向上が求められるため、導入には一定のコストが伴うかもしれません。
それって、既存の技術と比較して、効果的に改善できるんでしょうか?
これまでの手法と比較すると、バウンディングボックスを明示的にモデルに組み込むことで、一定の精度向上が見込まれます。ただし、具体的な効果の大きさは、実際の運用条件やデータの質によって大きく変わります。
それって、補助金前提の技術とかじゃないですか?
補助金の有無は関係なく、研究の方向性として、精度の高い推定モデルの構築が重要です。特に、安全監視などの用途では、精度の向上が重要な意味を持ちます。
それって、日本の農業現場で使えるんでしょうか?
農業の現場では、遠距離の監視が必要になる場面は多く、例えば大規模な農場や、鳥の飛来を監視する場合などでは応用が可能です。ただし、実際の運用には、地域や環境の条件によって課題が異なる可能性もあります。
そうですね、技術は進歩してるけど、実際の現場で活かすには条件がたくさんあるんでしょうね。
はい、技術の進歩と実運用のギャップは常にあります。今回の論文は、技術的な基礎を示すものであり、今後の実用化にはさらに多くの課題が残っています。
遠距離ドローン検出の課題
ドローンの遠距離検出は、ターゲットが非常に小さいこと、背景の混雑、ノイズの影響などにより困難です。特に、画像上でのドローンのピクセル数が極端に少なくなると、距離推定が困難になります。この課題に対処するため、本研究では画像とバウンディングボックスの特徴を統合した新しいモデルを提案します。
DroneDARモデルの構造と手法
DroneDARは、従来のDronerangerモデルをベースとして、ResNetをバックボーンに採用し、画像とバウンディングボックスの特徴をバランスよく融合する軽量なゲート機構を導入しました。このゲート機構により、遠距離ではバウンディングボックスの特徴を重視し、近距離では画像の特徴を重視する柔軟な推定が可能になります。

実験結果と性能評価
LRDDv3データセットを用いた実験結果、DroneDARモデルは従来のDronerangerモデルと比較して、MAEが3.56フィート、RMSEが2.18フィートの改善を示しました。特に遠距離領域(300フィート以上)において、精度向上が顕著です。また、入力解像度や損失関数の選択にも影響を受けることが判明しました。
農業への応用と意義
ドローンの遠距離での距離推定は、農業現場における自律飛行や監視、安全確保に重要です。DroneDARは、ドローンの位置を正確に把握できるため、農業ロボットの自律走行や、作物の状態監視、病害虫の早期発見などに応用が期待できます。特に、遠距離でのドローンの検出と距離推定精度が向上することで、農業の効率化に寄与します。
限界と今後の課題
DroneDARモデルは、バウンディングボックスのノイズに非常に敏感であり、精度の低下が起こる可能性があります。また、非常に遠距離でのドローンのピクセル数が極端に少ない場合、画像の特徴が限界に達するため、推定精度が低下します。今後の課題として、不完全な検出に対するロバスト性の向上や、時間的情報の活用が挙げられます。
日本での適用可能性
日本では、農業の高度化と労働力不足の問題が深刻化しており、ドローンを活用した農業ロボティクスの導入が進んでいます。DroneDARは、遠距離でのドローンの検出と距離推定精度を高めるため、農業現場での自律飛行や、作物の状態監視、病害虫の早期発見などに応用が可能です。特に、広大な農地でのドローンの運用において、安全性と効率性の向上に貢献します。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: DroneDAR: Long-Range Drone Distance Estimation Using Monocular Vision and Bounding-Box Features – 著者: Knut Peterson, Zaid Mayers, David Han – 発表日: 2026-06-05 – arXiv ID: 2606.07756v1 – カテゴリ: cs.CV