
ニューラルネットと滑らかな制御の融合で不安定な傾斜機を安定化
📄 論文サマリー
著者:Ali Kafili Gavgani、Amin Talaeizadeh、Aria Alasty、Hossein Nejat Pishkenari
発表:arXiv(eess.SY)/2606.08714v1
公開日:2026年06月07日
✨ 本論文の新規性
- 直接入出力制御では不安定な傾斜機を安定化できず、根本的な限界を示した
- 軽量ネットワークによる動的モデル学習と滑らかな制御の統合により、高精度な制御を実現
- 低性能コントローラーの飛行ログから学習可能で、実機への適用が可能
論文の主張: 傾斜機の高不安定性に対処するため、ニューラルネットと滑らかな制御を組み合わせたハイブリッド制御手法を提案。特にLSTMベースの動的モデルが優れた性能を示した。

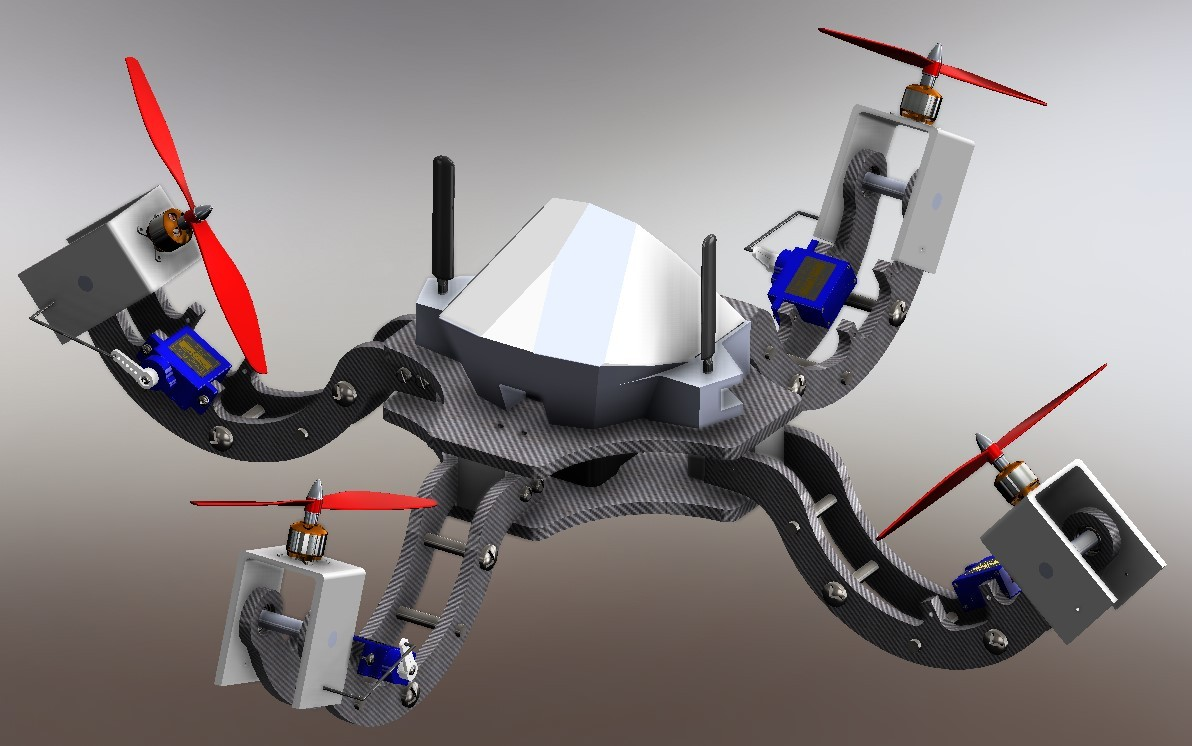
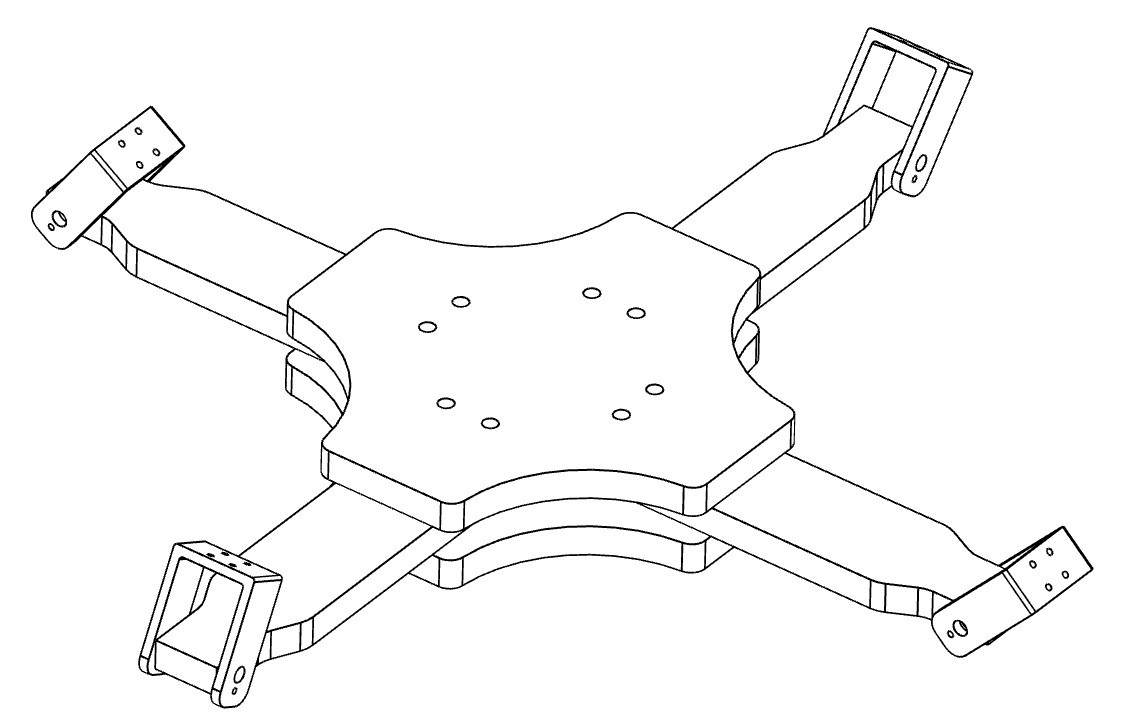
今回の動画では、『Hybrid Neural Network and Conventional Controller Approach for Robust Control of Highly Unstable Systems: Application to Tilt-Rotor Control』という論文について紹介しています。この研究は、四つの推力ベクトル入力を持つ完全アクチュエートなテールローター構造の制御に焦点を当てています。

なるほど、不安定なシステムの制御って難しいですよね。それって、農業の分野でも応用できるんでしょうか?
まさにその通りです。この論文では、まず直接入出力制御の手法を試みた結果、システムを安定化できなかったことが示されています。これは、特に不安定なシステムでは、直接的な学習型制御が難しいことを示唆しています。
そうなると、実用的な制御には、他のアプローチが求められるんでしょうね。
はい、その通りです。論文の主な貢献は、ニューラルネットワークを用いたスライディングモード制御(SMC)の提案です。この方法では、システムの動的特性を入力に依存する部分と依存しない部分に分解し、前者を少量のデータから軽量ネットワークで学習することで、リアルタイム計算コストを抑えています。
軽量ネットワークって、実装のハードルが下がるんでしょうか。
その通りです。このアプローチでは、低性能なコントローラーから得られた飛行ログを使って学習できるため、実運用環境でも導入が可能になっています。特に、マイクロコントローラーにも対応できる点が大きな利点です。
コストと導入のしやすさって、実際の農業現場では大きなポイントになるんでしょうね。
はい。また、LSTMベースのモデルがMLPベースよりも優れた性能を示しており、実行時の計算負荷も低いという点で、実用性の面でも注目されています。
これは、農業の自動化にも応用できるんでしょうか。例えば、ドローンの飛行制御など、精度と安定性が求められる分野で。
確かに、このような技術はドローンの制御において非常に有効です。特に、複雑な環境下での制御精度や安定性が求められる場面で、このアプローチは注目されています。
それって、初期投資の回収期間が長いと、導入が難しいんでしょうか。
その点については、論文では特に触れていませんが、実際の導入には、初期費用や運用コストの見込みが重要になるでしょう。
なるほど、コストと性能のバランスが大事ですね。
はい。この技術は、特に不安定なシステムを制御する際に大きな可能性を秘めています。実際の農業現場への応用は、今後の検証と導入が求められます。
背景と課題
従来のマルチローターは不完全アクチュエーションにより制限されており、特に農業分野では高精度な制御が求められる。傾斜機は4つの推力ベクトル入力により完全アクチュエーションを実現するが、その動的特性は非常に不安定である。このため、従来の制御手法では安定化が困難であり、新しいアプローチの必要性が浮き彫りになった。
手法・アプローチ
本研究では、直接入出力制御の失敗を示した上で、ニューラルネットを用いた滑らかな制御(SMC)のハイブリッド手法を提案。システムの動的特性を入力独立・入力依存に分離し、軽量ネットワークで入力独立項を学習。これによりリアルタイム計算コストを削減し、低コストマイコンでの実装が可能に。
実験結果
直接入出力制御ではシステムが不安定になることを確認。一方、提案手法では、LSTMベースの動的モデルがMLPに比べて平均絶対誤差(MAE)0.21(MLP: 1.05)を達成し、実行時間も38.5秒とMLPの41.5秒より短い。モデル不確実性や外乱に対するロバスト性も確認された。
意義・応用可能性
本手法は、農業用無人機の高精度制御に応用可能。特に、傾斜機の複雑な飛行制御において、安定性と計算効率の両立が可能であり、農業ロボットの実用化に寄与する可能性がある。
限界と今後の課題
提案手法は、低性能コントローラーからのデータを用いて学習可能だが、学習データの質に依存する。また、LSTMの計算コストは依然として高いため、より軽量なモデルの検討が必要。さらに、実機での実証実験は今後の課題である。
日本での適用可能性
日本では農業ロボットの普及が進んでいるが、地形や気候の変化に柔軟に対応する必要がある。本手法は、傾斜機の制御精度向上に寄与し、特に山間部や複雑な農地での飛行制御に有効である。また、低コストマイコンでの実装が可能で、日本の農業現場での導入も期待できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Hybrid Neural Network and Conventional Controller Approach for Robust Control of Highly Unstable Systems: Application to Tilt-Rotor Control – 著者: Ali Kafili Gavgani, Amin Talaeizadeh, Aria Alasty, Hossein Nejat Pishkenari – 発表日: 2026-06-07 – arXiv ID: 2606.08714v1 – カテゴリ: eess.SY