
低コストロボットで高速推論!VLAモデルのスレッド最適化技術
📄 論文サマリー
著者:Keith Truongcao、Christopher Nhu、Zijian An 他3名
発表:arXiv(ロボティクス)/2606.00966v1
公開日:2026年05月31日
✨ 本論文の新規性
- 低コストロボット向けにRTACアルゴリズムをシステムレベルで実装し、リアルタイム性を向上
- PythonのGIL制限を回避するためのスレッド最適化手法を提案し、推論速度を大幅に改善
- 農業用の農産物操作タスクにおいて、従来手法と比較してタスク完了時間を短縮
論文の主張: Vision-Language-Action(VLA)モデルを低コストロボットで高速に推論するため、リアルタイム動作を実現するスレッド最適化手法を提案。農業用のガーリックやナッツの操作タスクで効率性を検証。

今回の論文は、低コストのスマート農業マニピュレーションにおいて、ビジョン・言語・アクション(VLA)モデルの推論をスレッド最適化することで、制御の応答性と安定性を向上させたものです。特に、リアルタイムアクションチャンキング(RTAC)アルゴリズムを実装する際のシステムレベルの課題に焦点を当てています。

なるほど、RTACって以前聞いたことがあるんですけど、この論文では具体的にどうやってスレッドを最適化したんですか?
その点について、著者たちは、PythonのGIL(グローバルインタプリタロック)の影響を受けていた課題を解消するため、独自のスレッド実装を構築しました。これにより、推論スレッドと制御スレッドの間の非同期通信を効率的に管理し、推論と実行の間に遅延を抑えることができたのです。
それは重要な改善ですね。でも、この技術が実際に農業現場で使えるか、コストや導入のしやすさってどうなんでしょうか?
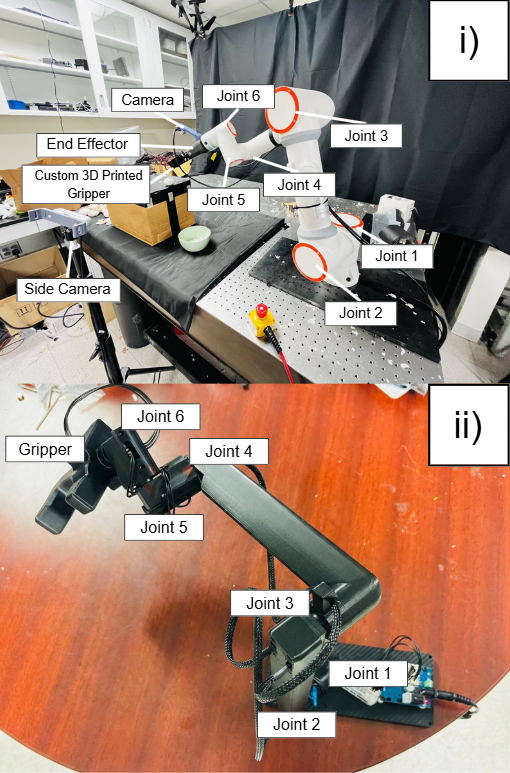
実験では、Fairino FR5という低コストロボットアーム(約4,000ドル)を用いて、ニンニクやハチミツの収穫を想定したタスクを実施しました。システム全体のコストは6,000ドル以下であり、実用性が確認されています。
コストが抑えられているのは良いですが、実際の農業現場では、その運用の複雑さやメンテナンスの手間ってどうなんでしょう?
研究では、特にスレッドの管理や、非同期実行における競合を避けるための設計が強調されています。これは、リアルタイム性が要求されるロボット制御において、安定稼働を確保するために極めて重要です。
あ、そういえば、この論文のスレッド構成は、元のRTACの擬似コードでは抽象的だった部分を補完したって言ってましたよね?
はい、それですね。元のRTACは数学的・アルゴリズム的枠組みは明確でしたが、実際のハードウェアに落とし込む際の詳細なスレッド設計は省略されていました。この論文では、具体的なスレッドの実装と制御の仕組みを示しており、実装の難易度を大幅に下げていると評価できます。
それって、他の研究と比べて、技術的な実装の難しさが軽減されたってことですよね?
そうです。特に、既存のVLAモデルの推論速度が遅いという問題を補完するため、並列処理による効率化を図った点が注目です。また、推論と制御の間の遅延を最小限に抑え、より滑らかな動作を実現しています。
そうなると、この技術は、小規模農家向けにも導入できる可能性があるかもしれませんね。でも、運用コストの見通しはどうなんでしょう?
それは、導入する際の初期投資と運用コスト、そして人件費の割合などを考慮する必要があります。特に、人手不足が深刻な地域では、自動化による効率化が効果的とされていますが、技術の導入にあたっては補助金の有無や政策環境が大きく影響します。
そうですね、政策の変化が大きいと、導入のタイミングや規模が変わってくるのは当然ですね。この研究の成果は、技術の可能性を示すものですが、実際の導入は慎重に進める必要があるかもしれません。
はい。技術の進歩はありますが、実際の農業現場における適用には、コスト、人材、環境、政策など多くの要素が絡んでくるため、バランスの取れた判断が必要です。この論文は、その中での重要な一歩と言えるでしょう。
背景と課題
Vision-Language-Action(VLA)モデルは自然言語命令からロボットの動作を生成する技術として注目されているが、推論速度が遅く、リアルタイム制御に課題がある。特に、Transformerベースのモデルは制御周波数に合致せず、動作の滑らかさや精度に影響を与える。本研究では、低コストのロボットアームFairino FR5を用い、VLAモデルの推論と制御を非同期的に処理するRTACアルゴリズムを実装し、そのスレッド構成を最適化することで、制御の応答性と安定性を向上させた。
手法・アプローチ
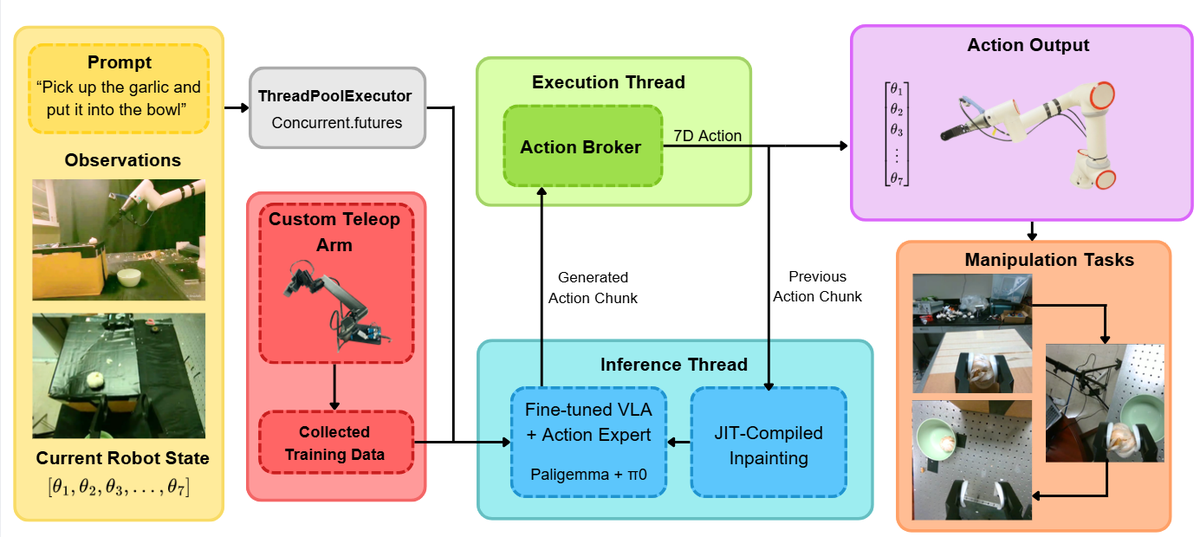
本研究では、PythonのGIL(グローバルインタプリタロック)による並列実行制限を回避するために、JAXベースの推論と実行を非同期に処理するスレッドアーキテクチャを採用。推論スレッド(Thread 0)はVLAモデルによるアクションチャンクを生成し、実行スレッド(Thread 1)はそのアクションをロボットに送信する。この構成により、推論と制御の間の遅延を最小限に抑え、制御の滑らかさと精度を高めた。
実験結果
ガーリックとナッツの操作タスクを用いた実験結果、標準のπ0モデルとRTACベースの手法と比較して、提案手法の最適化RTACはタスク完了時間とエピソード完了時間の両面で平均12.9%の高速化を実現。特に、ガーリック操作では標準π0と比較して25.6%の高速化が確認され、ナッツ操作でも11.9%の高速化が得られた。
意義・応用可能性
本手法は、低コストロボットで高精度なVLA制御を実現するための基盤技術として、農業現場での自動化に貢献する可能性がある。特に、農産物の取り扱いや分類作業において、従来の手作業に比べて作業効率を大幅に向上させられる。
限界と今後の課題
本研究では、特定のハードウェア(Fairino FR5)とソフトウェア環境(Python + JAX)に依存しているため、他の環境への適用には調整が必要である。また、より複雑なタスクやマルチロボット環境への拡張は今後の課題として残っている。
日本での適用可能性
日本では農業の労働力不足が深刻化しており、本手法は農業ロボットの導入を加速させる可能性がある。特に、低コストで高精度な制御が求められる地域の農業現場や、農産物の分類・包装作業に応用が期待できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Threading Optimization for Vision-Language-Action Model Inference in Low-Cost Smart Agricultural Manipulation – 著者: Keith Truongcao, Christopher Nhu, Zijian An, Phong Nguyen, Siwei Cai, Lifeng Zhou – 発表日: 2026-05-31 – arXiv ID: 2606.00966v1 – カテゴリ: cs.RO