
今回は、イチゴの自動収穫ロボットについて紹介します。近年、イチゴ栽培では、高設栽培法の導入が進んでいますが、導入の初期コストが大きいことが問題点としてあげられます。そこで、本研究グループ(Yang Yu, Kailiang Zhang, Hui Liu, Li Yang and Dongxing Zhang)は、従来の畝仕立てでも利用可能な、イチゴ収穫ロボットの開発を行っています。
同技術は、イチゴ栽培を省コストで、省力化を達成できる可能性を秘めています。
イチゴ収穫の現状
園芸作物の中でも、イチゴは、収穫する果実1つ1つが小さいため、収穫に時間を要することや、従来の畝仕立ての栽培法では、収穫時に中腰の作業姿勢が多いことから、特に省力化が求められている作物です。
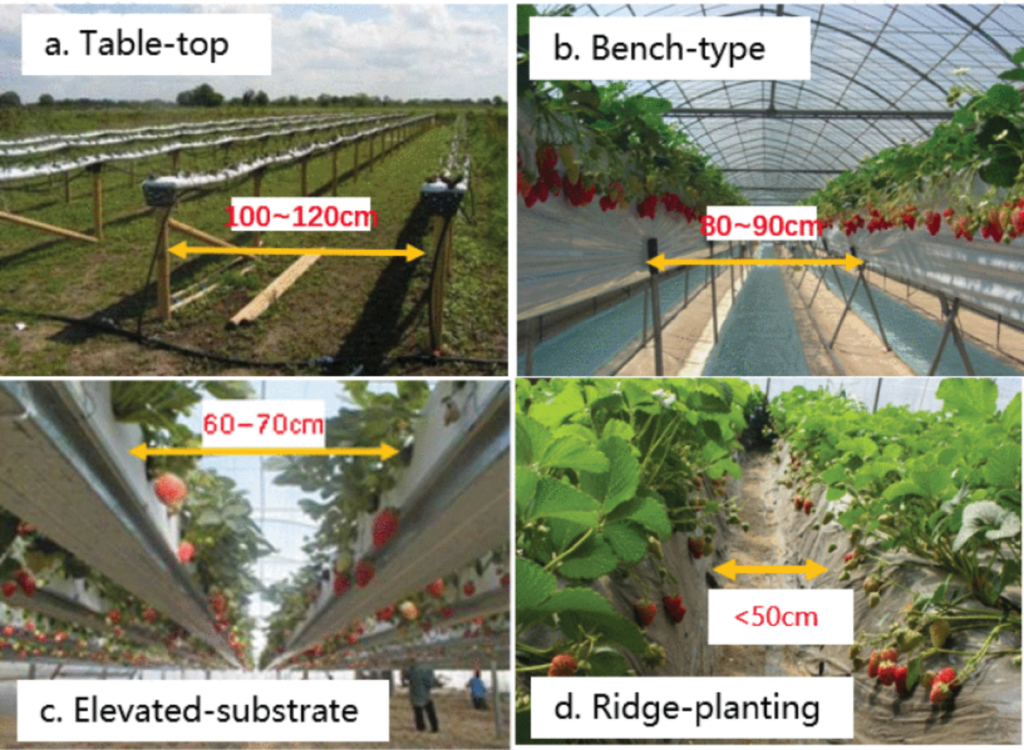
このことに対し、高設栽培法の導入が進み、平成26年には、イチゴ栽培面積のうち20%が高設栽培となったと報告されています(1)。しかしながら、高額な導入コストが問題となっています。
そこで今回は、従来の畝仕立ての栽培法において、導入可能な収穫ロボットの試作と、その実証実験事例を報告した論文を紹介します。
畝仕立てに対応した、新たなイチゴ収穫ロボット
中国では、いまだ畝仕立て栽培が全栽培面積の9割を占め、収穫に関わる人件費が、コストの75%を占めています。そこで、中国農業大学の研究グループは、畝仕立てに対応した収穫ロボットの試作と、その実証実験を行いました。
イチゴ収穫ロボットを製作するにあたり
“イチゴ果実は傷つきやすいことから、エンドエフェクターが果実に触れられないこと”
が最大の問題点でした。そこで、果実に触れずに収穫できるよう、エンドエフェクタ先端にCutting Blade(ハサミのようなイメージ)を取り付け、果実から13~20mmの果梗部を切ることで収穫を行える設計としました。(以前本サイトで紹介したTraptic社は果実に触れるいちご収穫ロボットでした)
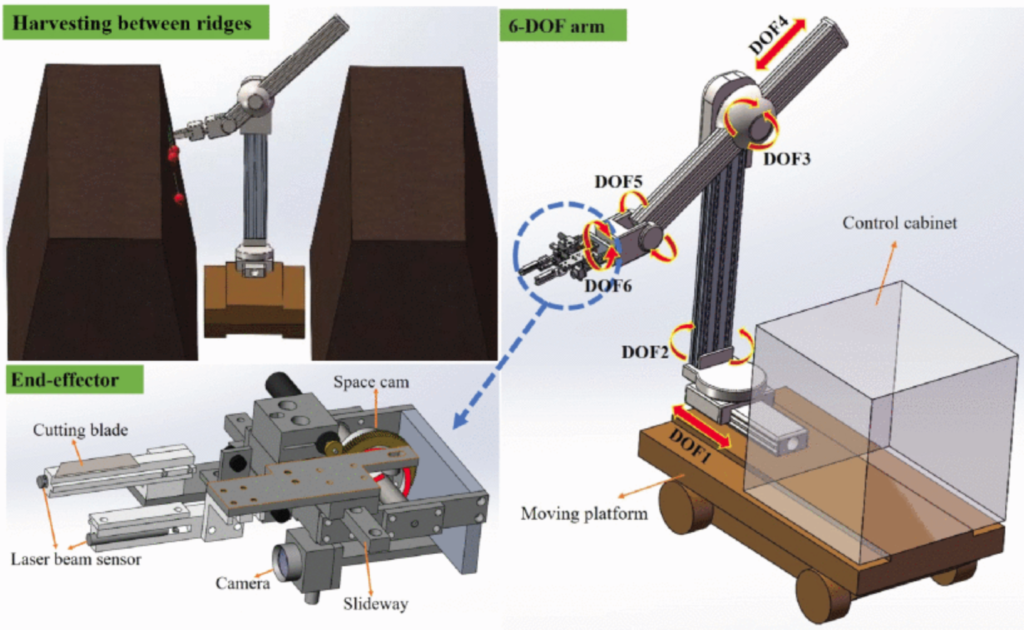
また、Cutting Bladeのそばに、USBカメラを取り付けることで、収穫する果実を、常時捕捉できるように工夫されていることも特徴です。
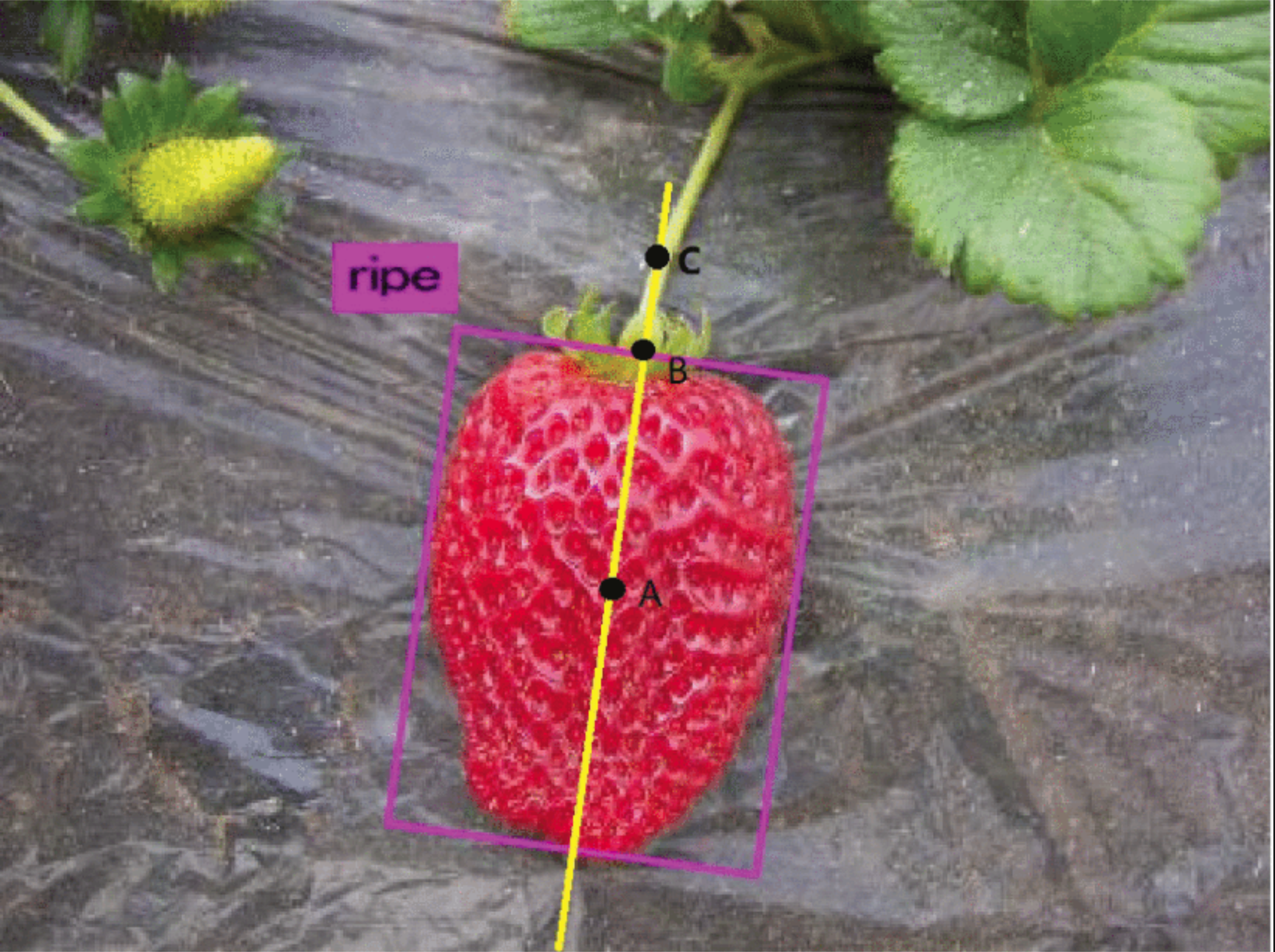
さらに、新たに設計したR-YORO(YOROとは、物体の検出・認識手法の1つであり、今回は、イチゴで用いやすいように改良した)検出器は、イチゴの着果位置や角度を正確に認識できることから、隣接する果実へのエンドエフェクタによる損傷を防ぐ工夫がなされています。
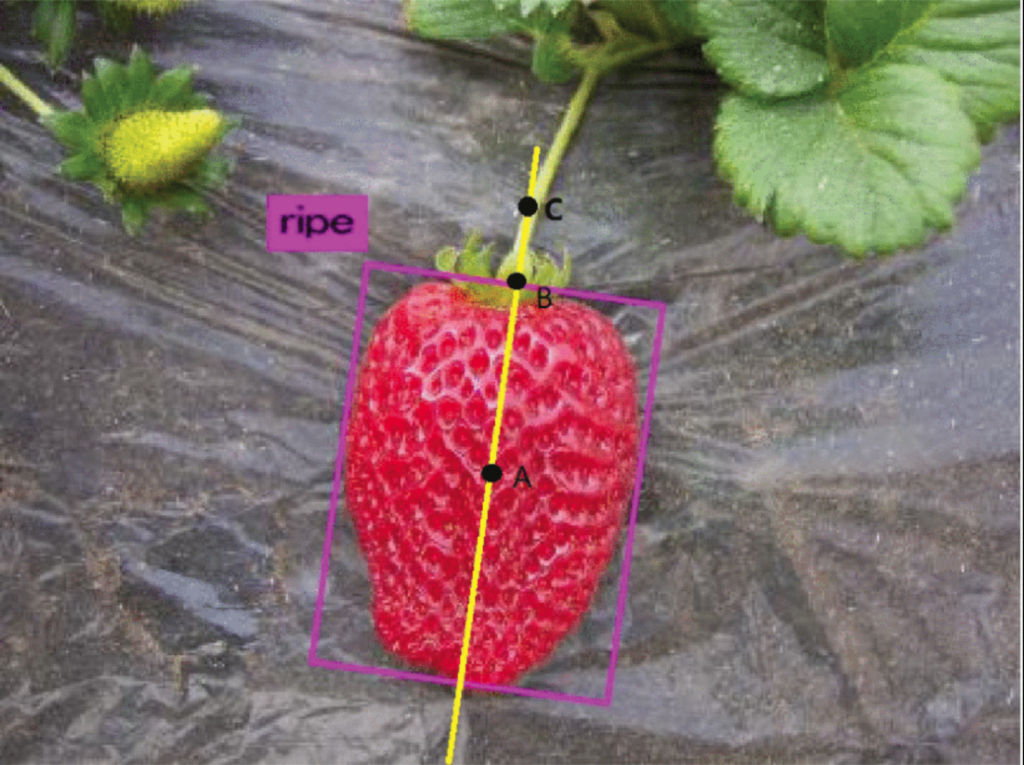
実際の試験では、成熟した果実において、97.17%の適合率(成熟したと認識したうち、実際に成熟果であった割合)、95.81%の再現率(認識できた成熟果実の割合)を達成し、84.35%の果実を収穫することができました。
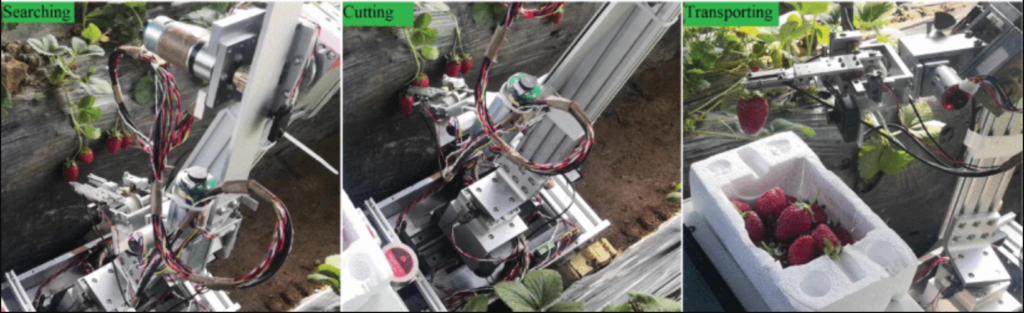
一方、果実面積のうち50%以上が、葉や他の障害物で覆われた場合、正しく認識できず、収穫することができなかったことから、今後の改良点であると考えられます。また、今回の試作機では、イチゴを収穫し、エンドエフェクタでつかんだまま、一時的な保管容器に運搬しました。今後は、収穫した果実をベルトコンベアーで運搬し、保管容器に移すなど、収穫の効率化を目指していきたいとも述べられていました。
コメント
これは都市部におけるイチゴ農家さんの例ですが、「イチゴ栽培において、着果量が増加してくる3月以降の収穫が間に合わないことが最大の問題であり、着果量が増える時期は摘み取り園など、観光農園化することで、対応する」とのことをおっしゃっていました。一方、このような手法は、都市部にある農園であるからこそできる手法かもしれません。
今回の新技術は、収穫繁忙期に発生する問題を解決できる可能性があります。96%の成熟果実を認識し、84%を収穫できていれば、おおまかに機械で収穫し、残りの部分については、農家自身の手により収穫することで、収穫期の人手不足問題を、大きく改善できる可能性があります。一方、論文中に、1果実の収穫に要する時間が明記されていませんでしたが、今後製品化に向けては、認識・収穫技術のみでなく、収穫のスピード向上を含めた改良がなされることを期待したい技術です。
なお、日本国内でも、イチゴの収穫ロボットについての研究が進んでおり(2)、さらなる発展を期待したい分野です。
今回紹介した論文
Yang Yu, Kailiang Zhang, Hui Liu, Li Yang and Dongxing Zhang. Real-Time Visual Localization of the Picking Points for Ridge-Planting Strawberry Harvesting Robot, IEEE Access 8: 116556-116568. 2020. CC-BY 4.0.
(今回記事内の“畝仕立て栽培に対応した、新たなイチゴ収穫ロボット”およびその他紹介した図表は、上記論文のデータ等を一部抜粋・改変したものを記載しています。)
論文オープンアクセスURL:
https://ieeexplore.ieee.org/abstract/document/9119372
その他参考URL
- (1)イチゴ栽培の軽作業化技術の推進 – maff.go.jp
https://www.maff.go.jp/j/seisan/gizyutu/hukyu/h_zirei/pdf/29h27_nara3.pdf - (2)新容器で高級イチゴを傷つけずに収穫・搬送 – 日経ビジネス電子版 Special https://special.nikkeibp.co.jp/NBO/businessfarm/agribusiness/04/