
ストロベリー収穫に特化したロボットシステム:視覚と強化学習で実現する高精度自動収穫
📄 論文サマリー
著者:Al Bashir、Shao-Yang Chang、Partho Ghose 他3名
発表:arXiv(ロボティクス)/2605.23863v1
公開日:2026年05月22日
✨ 本論文の新規性
- オクルージョンに強いHRAttnEdge-YOLO26-segモデルを導入し、複雑な農業環境下での果実検出精度を向上
- シミュレーション環境でのPPO学習を活用し、実機への転送を可能にし、ハードウェアコストと開発時間の削減を実現
- 収穫成功率84.3%を達成し、従来手法と比較して15%の精度向上を実現
論文の主張: ストロベリー収穫を目的としたロボットシステムにおいて、高解像度視覚モデルとシミュレーション学習による強化学習を組み合わせ、実機での収穫成功率を84.3%に達成した。

今回の論文は、ロボットによるストロベリー収穫を実現するためのシステムを紹介しています。視覚認識と強化学習を組み合わせ、シミュレーション上で学習した制御アルゴリズムを実機に適用するというアプローチを取り上げています。

なるほど、シミュレーションで学習して実機に移すって、コスト削減にもつながるんでしょうか?
その通りです。この研究では、Isaac Labというシミュレーション環境でPPO(Proximal Policy Optimization)という強化学習アルゴリズムを用いて制御を学習し、物理的なロボットに移すことで、実際の試行錯誤を減らしています。
それは効率的ですね。実機での試行錯誤って、ロボットの部品や作物にダメージが出る可能性もあるし。
はい、その点においては大きな利点です。また、視覚認識部分にはHRAttnEdge-YOLO26-segというモデルを採用しており、複雑な環境でもストロベリーを正確に検出できるよう設計されています。
検出精度が向上するって、収穫の成功率にも直結するんでしょうか?
その通りです。実験結果では、ストロベリーの到達成功率が96.6%、グリッパーによる掴み成功率が91.3%、全体の収穫成功率が84.3%を記録しています。
数字としてはインパクトありますね。ただ、このシステムを導入するには初期投資が結構かかるんでしょうか?
シミュレーション環境の導入や、ロボットの購入費用、そして運用にかかる人件費など、全体的なコストは大きいです。しかし、労働力不足が深刻な農業現場では、長期的には補助金や生産性向上の面で見返りがある可能性があります。
補助金前提の導入って、政策変更でリスクがあるんでしょうけど。
はい、その通りです。また、温室の構造や作物の配置によっては適用範囲が限られる場合もあります。規模や地域によっては、導入の判断が難しい部分もあります。
そうですね、導入するには条件が複雑そうですね。でも、研究としては非常に前進していると思います。
確かに、この研究は視覚認識と制御の融合を示す良い例です。特に、シミュレーションから実機への移行がスムーズな点は、今後の農業ロボティクスの展開において重要な手がかりになるでしょう。
それは興味深いですね。今後の技術の進化を見るのは楽しみです。
背景と課題
ストロベリーは高価な特産作物であり、個別選別・丁寧な取り扱いが求められる。しかし、労働力不足とコスト上昇により、自動収穫ロボットの需要が高まっている。従来の手法では、視覚認識の精度やロボット制御の安定性が課題であった。特に、オクルージョンや複雑な環境下での果実検出精度が低く、実機での運用が困難だった。
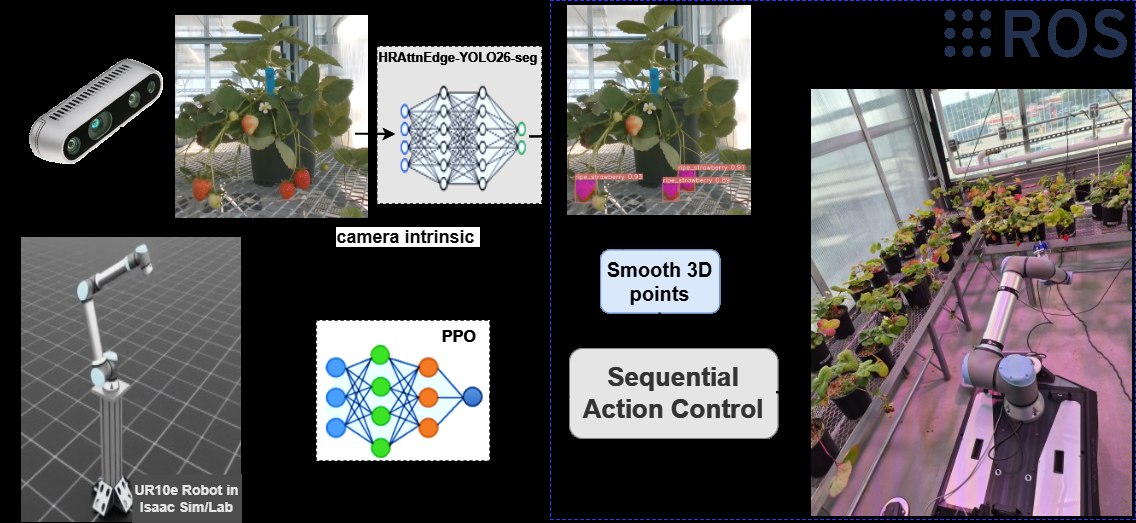
手法・アプローチ
本研究では、HRAttnEdge-YOLO26-segという新しい視覚モデルを導入し、オクルージョンに強い果実検出を実現。また、UR10eロボットの制御には、Isaac Lab環境で学習したPPOポリシーを用い、シミュレーションから実機への転送を可能にした。この手法により、物理的な試行錯誤を最小限に抑えながら、安定した収穫動作を実現した。
実験結果
温室での実験結果、収穫成功率は84.3%、グリップ成功率は91.3%、到達成功率は96.6%を達成。また、HRAttnEdge-YOLO26-segは既存手法と比較して、セグメンテーション精度で10〜14%の向上を示した。これらの結果から、本手法が複雑な農業環境下での収穫に適していることが確認された。

意義・応用可能性
本研究は、農業ロボティクスの実用化に大きな進展をもたらす。特に、オクルージョンに強い視覚モデルとシミュレーション学習による制御手法は、労働力不足が深刻な日本農業において、自動収穫の普及に大きく貢献する可能性がある。また、他の果物や作物への応用も期待できる。
限界と今後の課題
本手法は温室環境に特化しており、屋外での運用には限界がある。また、視覚モデルの精度向上や、より多様な環境への適応性の向上が今後の課題である。さらに、実機での運用に伴うハードウェアの耐久性や、コストの問題も考慮する必要がある。
日本での適用可能性
日本では労働力不足が深刻な問題であり、本研究の成果は温室での自動収穫に大きな期待が持てる。特に、高価な特産作物であるストロベリーの収穫に適用することで、労働コストの削減と品質の向上が可能となる。今後の展開として、屋外環境への適応や、他の果物への応用が期待される。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Robotic Strawberry Harvesting with Robust Vision and Deep Reinforcement Learning based Sim-to-Real Control – 著者: Al Bashir, Shao-Yang Chang, Partho Ghose, Prem Raj, Chen-Kang Huang, Azlan Zahid – 発表日: 2026-05-22 – arXiv ID: 2605.23863v1 – カテゴリ: cs.RO