
魚の魚鰭を模倣したソフトロボットグリッパーの最適設計と解析モデル
✨ 本論文の新規性
- 魚の魚鰭構造を模倣したソフトグリッパーの設計手法を提案し、農業用に最適化
- 有限剛体要素法(FREM)を用いた解析モデルにより、柔軟性と剛性のバランスを実現
- 実験と数値シミュレーションの統合により、実用的な力制御が可能に
論文の主張: 魚の魚鰭構造を模倣したソフトグリッパーを設計・解析し、農業における繊細な作物の扱いに適した力制御を実現。有限剛体要素法を用いたモデルが実験結果と一致し、精度は2〜3%の誤差を示した。

今回の論文は、魚の.fin構造を参考にしたソフトロボティクスのグリッパーについての研究です。特に、農業現場で扱うやわらかい作物を安全に扱うための設計と、それを数値解析でモデル化する方法について述べています。

なるほど、魚のfinがヒントって、意外とユニークですね。このグリッパー、どんな作物に使われると考えられていますか?
論文では、トマトのような柔らかい果物を扱うことを想定しています。特に、形状が不規則で、壊れやすい作物を扱う際のグリッパーの適応性や、力のコントロールが重要とされています。
そうですね、それって、現状のロボットでやるのは難しい部分ですよね。手を柔らかくして、柔らかいものに触れるって、結構難しいですよね。
その通りです。技術的には、有限要素法(FEM)と呼ばれる手法を使って解析されています。この手法は、材料の変形や応力分布を数値的に求められるもので、グリッパーの設計を最適化するための重要な手段です。
それって、結構複雑な解析なんですよね。コストと精度のバランスって、結構難しいんでしょうけど。
そうです。論文では、数値解析と実験結果の比較を重ねて、設計の精度を評価しています。例えば、解析結果と実験結果の誤差は3%以内と、比較的高い精度を示しています。
実験と理論の整合性が取れているのは、良いですね。でも、実際の現場で導入するには、コスト面や運用面の課題もあるんでしょうけど。
はい、その点についても言及されています。特に、構造の最適化では、接触力、変形、応力分布といった複数の指標を考慮しています。これは、実際の製品開発においても、設計のバランスを取る上で重要な要素です。
なるほど、設計の最適化って、単純に「柔らかくすればいい」じゃなくて、複数の条件を考慮しないと、うまくいかないんだなと思いました。
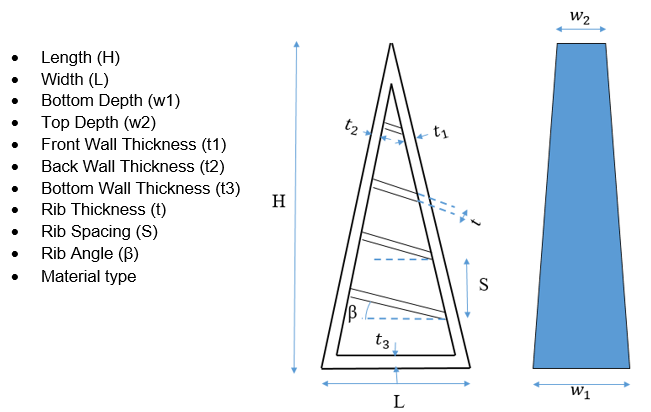
そうですね。例えば、グリッパーの設計では、長さ30mm、肋の間隔10mm、肋の角度-15度、厚さ1mmといったパラメータが最適化されています。これによって、柔軟性と強度のバランスを取っているのです。
それって、設計の段階で数値シミュレーションがかなり重要なんですね。実際の試作に時間がかかったり、試行錯誤が増えると、導入が遅れる可能性があるんでしょう。
その通りです。この研究は、実験とシミュレーションの両面から検証されており、実用化の可能性を高めています。ただ、実際の農業現場での導入には、運用コストやメンテナンスの問題も残っていますね。
そうですね、確かに。技術的な面では進歩しているけど、現場の実情に合わせるには、もう少し工夫が必要かもしれませんね。
背景と課題
農業現場では、トマトなどの繊細な作物を安全に扱うためのグリッパーが求められている。従来の剛性ロボットでは対応が難しいが、ソフトロボットは柔軟性と適応性を有する。特に魚の魚鰭構造を模倣したFin Ray Effect(FRE)グリッパーは、形状に応じた適応性と安定したグリッピングが期待できる。しかし、非線形性や無限自由度の特性により、設計と制御に課題がある。
手法・アプローチ
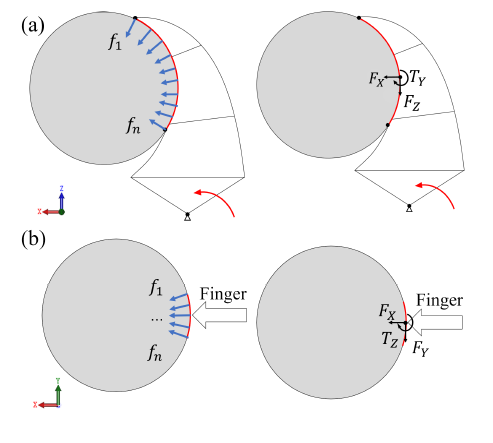
本研究では、有限剛体要素法(FREM)を用いた解析モデルを構築し、FREグリッパーの最適設計を実施した。材料にはTPU 95Aを用い、3Dプリンタで製造。シミュレーションはANSYSで行い、設計パラメータ(長さ、肋の間隔、角度、厚さ)を最適化した。FREMモデルは理論的変形を3%以内の誤差で予測し、ANSYSモデルは2%以内の精度を示した。
実験結果
最適設計では、グリッパーの長さ30mm、肋の間隔10mm、肋の角度-15度、厚さ1mmの構成が選定された。FREMモデルの変形予測精度は3%、ANSYSモデルは2%の誤差を示した。接触力と変形の評価において、設計パラメータの最適化により、柔軟性と剛性のバランスが実現された。
意義・応用可能性
本手法は、農業における繊細な作物の扱いに特化したソフトグリッパーの設計に貢献する。特に、トマトなどの柔らかい果物を安全に収穫・運搬できる可能性があり、農業ロボットの自動化に大きく寄与する。また、有限剛体要素法を用いたモデルは、制御設計への応用が期待できる。
限界と今後の課題
本研究では、TPUの非線形性や変動するヤング率を考慮したが、実際の環境変化への耐性は未検証である。また、FREMモデルは解析的精度が高いが、リアルタイム制御への適用にはさらなる改善が必要。今後の課題として、環境変化に強いモデルの構築と、実機での性能評価が挙げられる。
日本での適用可能性
日本の農業では、労働力不足と高齢化が進んでいるため、ソフトロボットの導入が期待される。特に、トマトやナスなどの繊細な作物の収穫に本グリッパーが活用できる。また、農業現場での実験環境を整備し、日本独自の作物特性に合わせた調整が必要である。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Optimal Design and Analytical Modeling of a Soft Fin-Ray Effect Gripper Finger Using the Finite Rigid Elements Method – 著者: Sara Adeli, Hassan Sayyaadi – 発表日: 2026-06-02 – arXiv ID: 2606.03798v1 – カテゴリ: cs.RO