
垂直構造で収穫効率向上!二本腕ロボットの新技術が果実損傷を抑える
📄 論文サマリー
著者:Keyi Zhu、Kyle Lammers、Chaaran Arunachalam 他3名
発表:arXiv(ロボティクス)/2606.14089v1
公開日:2026年06月12日
✨ 本論文の新規性
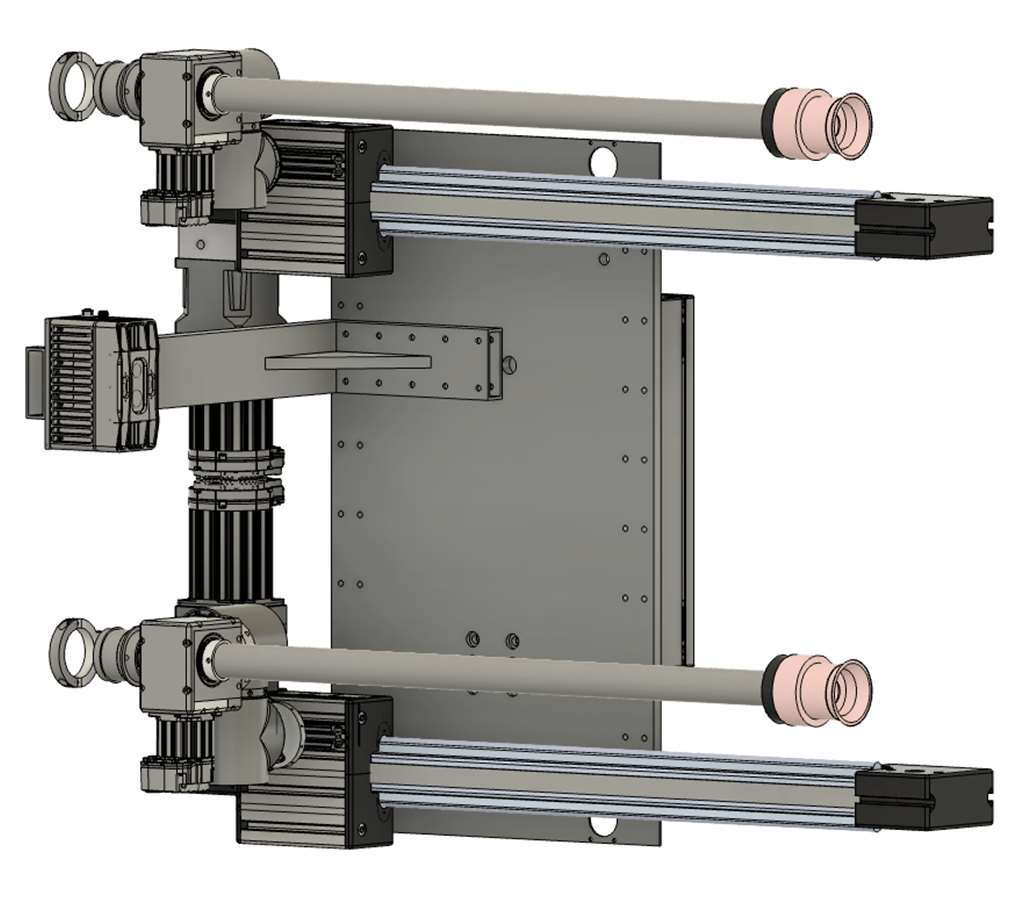
- 垂直スタック構造の二本腕ロボットにより、1回の収穫で上部・下部の果実を同時に処理可能に
- Foundation Modelを活用した高精度な果実検出と位置推定により、オクルージョン下でも安定動作を実現
- 真空吸引の共有制御と非同期スケジューリングにより、収穫速度を28%向上させた
論文の主張: 垂直構造の二本腕ロボットは、果実のオクルージョンや変化する照明条件下でも高精度で果実を検出し、収穫成功率80.0%を達成。真空吸引の共有制御により、収穫速度が従来比で1.76倍高速化。

この論文は、マニュアルで採れる果物を機械で収穫する技術についての研究で、特にアップルの収穫ロボットに焦点を当てています。

なるほど、果物を機械で収穫するって、まさに農業の自動化ですね。特に労働不足が深刻な果物収穫には、重要ですよね。
そうです。この研究では、従来の単一の腕ロボットではなく、2本の腕を垂直に積んだ構造を持ったロボットを提案しています。
垂直積み構造って、どういうメリットがあるんですか?
この構造では、1本の木の上部と下部を同時に収穫できるため、木ごとの位置移動を減らして効率を上げています。
なるほど、それって、以前の横に並べた構造と比べて、収穫速度が上がるんですか?
はい、実験では1回の試行に3.65秒かかり、前回のシステムと比較して1.76倍の速度が出ています。
えっ、そんなに速いんですか?それって、実際の果园で効果的そうですね。
その通りです。また、収穫の成功率は80.0%で、果物の傷害率も2.4〜4.9%と、非常に低い水準を維持しています。
品質もしっかり保たれているというのは、とても良いですね。コストはどのくらいか、ちょっと気になるところです。
データでは、システムの実行時間は平均7.53秒、また、真空吸引の共有を効率的に行えるようにしたことで、負荷も抑えられています。
そうすると、稼働率が高くなるってことですか?運用コストの見込みも気になるですね。
はい、補助金の導入や、運用における維持管理のコストが鍵になります。業界では、自動化の導入にかかる初期投資の回収期間が長いとされています。
なるほど、これは導入判断が難しいですね。でも、この技術が市場でどれだけ採算が取れるかは、規模や地域次第だと思われますね。
そうですね。今後の展開としては、果物の成熟度に応じた選別も可能になる可能性があり、市場のニーズにも応えるでしょう。
それって、将来的に販売価格の差も生まれるかもしれませんね。
まさにその通りです。この技術は、特に大規模な果物生産地での導入が期待されており、今後の実証実験が重要です。
今回の論文、とても興味深い内容でしたね。今後の実装や、実際の果园での導入が楽しみです。
背景と課題
アメリカのリンゴ産業では、労働力不足が深刻化しており、機械による収穫が求められている。従来の単腕ロボットは、果実を1つずつ処理するため、収穫効率が低く、オクルージョンや照明条件の変化に弱いという課題があった。この論文では、垂直スタック構造の二本腕ロボットを提案し、果実の検出精度と収穫速度の向上を目指している。
手法とアプローチ
本研究では、Grounding-DINOとEfficientViT-SAMを用いた基礎モデルベースの視覚認識パイプラインを導入。これにより、オクルージョン下でも安定した果実検出が可能になった。また、7次多項式によるジャerk制限付き軌道生成とControl Barrier Function(CBF)による安全フィルターを用い、高速かつ安全な動作を実現。さらに、真空吸引の共有制御と非同期スケジューリングにより、収穫効率を向上させた。

実験結果
実地試験では、2つの商業林でニコテルとエンヴィーのリンゴを収穫し、収穫成功率は80.0%を達成。1回の収穫サイクル平均で7.53秒を要し、従来の単腕システムと比較して1.76倍の高速化が実現された。果実の損傷率は2.4%〜4.9%と低く、 USDAの最高グレード(Extra Fancy)を維持できた。
意義と応用可能性
本技術は、果物の収穫効率を大幅に向上させ、労働力不足の問題を緩和する可能性がある。特に、オクルージョンや照明条件の変化に強い視覚認識システムは、日本における果物収穫ロボットの実用化に大きく貢献する。また、真空吸引の共有制御は、エネルギー効率の向上にもつながる。
限界と今後の課題
本システムは、果実の検出精度と収穫速度の向上に成功したが、重い葉のオクルージョンが続く場合の処理速度は依然として課題である。また、真空吸引の共有制御は、複数の腕が同時に動作する場合に複雑になる可能性がある。今後の改善として、より高速な認識アルゴリズムや、より柔軟な制御アルゴリズムの導入が考えられる。
日本での適用可能性
日本では、果物の収穫労働力不足が深刻化しており、本技術は特にリンゴやナッツなどの果物収穫に応用が期待できる。特に、日本では林業の自動化が進んでいるため、垂直スタック構造のロボットは、林間の複雑な環境にも対応できる可能性がある。また、真空吸引の共有制御は、コスト削減にもつながるため、農業現場での導入が進む可能性が高い。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: A Modular Dual-Arm Apple Harvesting Robot with Enhanced Field Performance – 著者: Keyi Zhu, Kyle Lammers, Chaaran Arunachalam, Kaixiang Zhang, Renfu Lu, Zhaojian Li – 発表日: 2026-06-12 – arXiv ID: 2606.14089v1 – カテゴリ: cs.RO