
複数LiDARセンサー融合と再ランキングで農業ロボットの位置認識を強化
📄 論文サマリー
著者:Judith Vilella-Cantos、Juan José Cabrera、Mónica Ballesta、David Valiente、Luis Payá
発表:arXiv(コンピュータビジョン)/2606.13503v1
公開日:2026年06月11日
✨ 本論文の新規性
- Livox Mid-360とVelodyne VLP-16の異種LiDARデータを早期融合する初めての手法を提案
- 農業現場の繰り返し環境に適した再ランキング戦略を導入し、Recall@1を30%向上
- vineyard環境における長期的な位置認識性能を大幅に改善するMinkUNeXt-VINE++モデルを構築
論文の主張: 農業ロボットの自律走行を支える位置認識技術として、複数のLiDARセンサーを融合し、再ランキングを行う手法を提案。vineyard環境においてRecall@1が61.41%を達成し、従来手法より大幅に性能向上。

今回の論文は、農業現場のような非構造的環境において、高精度な場所認識を実現するための新しいLiDAR融合手法について述べています。Livox Mid-360とVelodyne VLP-16という異なるセンサーのデータを早期に融合し、再ランキング戦略を導入することで、認識精度を大幅に向上させています。

複数のセンサーの情報を統合することで、より安定した場所認識が可能になるってことですね。特に vineyard のような繰り返しの構造が多い環境で効果的そうですね。
そうなんです。特に vineyard のような環境では、季節ごとに植被が変化し、同じ場所でも見た目が大きく変わるため、従来手法では正解が見つけにくかったんです。この研究では、早期融合と再ランキングの組み合わせで、その課題を補完しています。
データを融合するって、コストが上がるイメージがありますけど、効果的に再利用できるってのは、実際の導入を考える上では大事なポイントかもしれませんね。
確かにコスト面では注意が必要ですが、この論文では低コストなLiDARセンサーを使っており、実用性を考慮した設計になっています。また、データセットとして TEMPO-VINE という、vineyard における多様な生育段階をカバーしたデータを用いているので、実環境に近い評価が可能です。
Recall@1 で 20% の改善が見られると、誤検出が大幅に減るってことでしょうか。実運用で効果があるか、ちょっと気になるところです。
Recall@1の改善が20%というのは、特に検索の最初の候補が正解である確率が大幅に上がっていることを意味します。再ランキングの導入によってさらに30%の向上が見られているので、実際のシステムに組み込むと、誤認識のリスクが大幅に減る可能性があります。
それは、ロボットの走行や機械の操作の精度が上がるという意味ですね。でも、導入に必要な初期投資や、運用コストって、どのくらい考えられているんでしょうか。
この研究では、コストを抑えることを前提に設計されています。例えば、Livox Mid-360のような低コストセンサーを活用し、既存の技術を活かすことで、導入コストを抑えています。また、学習モデルの再利用性も高いため、長期的には運用コストも削減できる可能性があります。
それなら導入のハードルも低くなるかもしれませんね。ただ、農業現場は季節性が強いので、季節ごとの変化をどう吸収するかが鍵になりそうです。
まさにそこですね。この手法は、異なる生育段階でも安定して性能を発揮できるように設計されており、季節ごとの変化に対応する再ランキング機能が重要な役割を果たしています。
農業の現場で導入するには、技術的な側面だけでなく、運用の柔軟性も求められるんでしょうね。
はい、この手法は既存のシステムとの互換性も考慮されており、導入のハードルを低くするための工夫がされています。研究では、単一センサーの手法や、他の最先端手法との比較も行われており、性能面での優位性が示されています。
データの融合と再ランキングの組み合わせ、これって今後、他の農業分野にも応用できる気がしますね。
特に、作物の種類や成長状況によって環境が変化する農場や、複雑な地形を持つ地域などでは、このような技術の応用が期待できます。今後の展開も楽しみですね。
農業現場での位置認識の課題
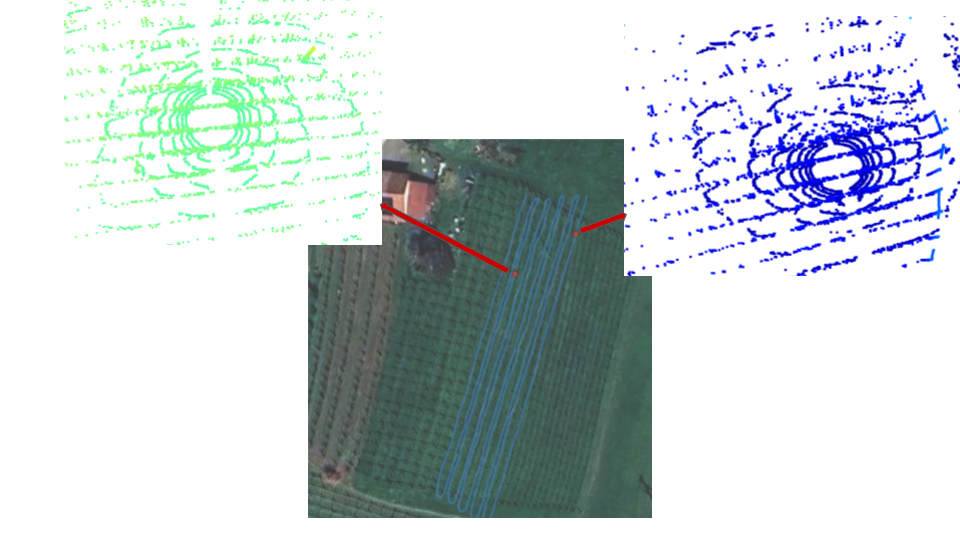
農業現場は不規則な環境であり、光の変化や植物の成長などにより、従来の位置認識技術が困難である。特に、葡萄園のような繰り返し構造の環境では、似た場所が多く、誤検出が増える。本研究では、LiDARを用いた位置認識手法の強化を目指し、異種センサーの融合と再ランキング戦略を導入した。
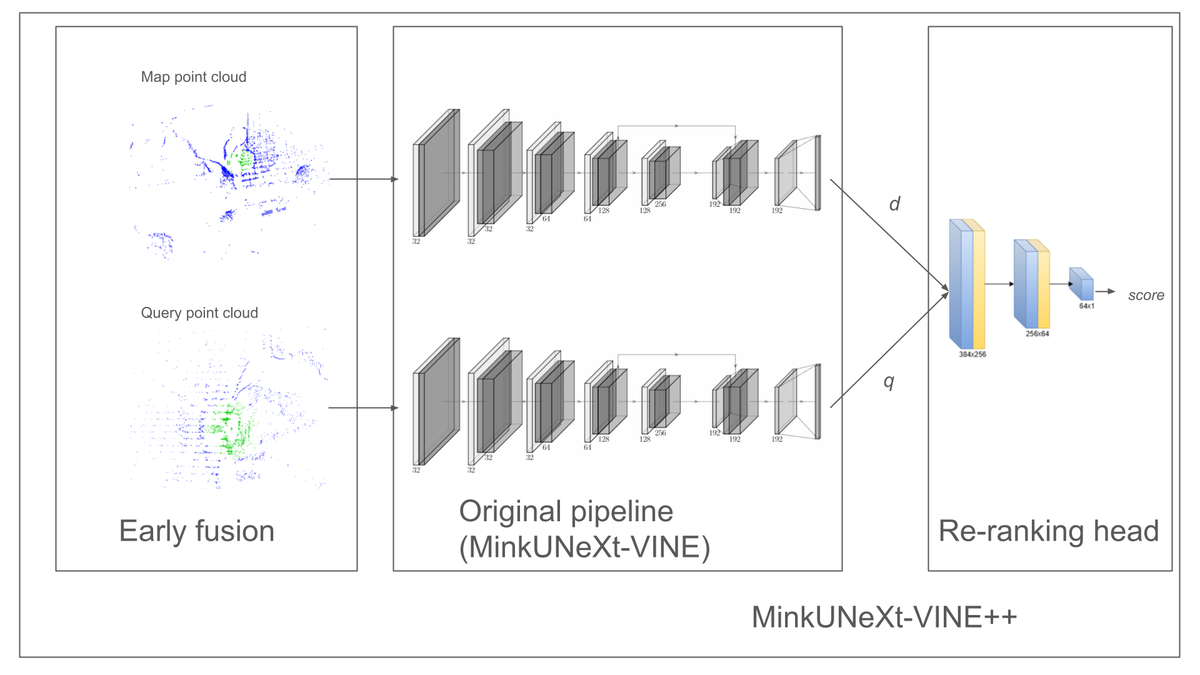
異種LiDARの早期融合と再ランキング戦略
提案手法MinkUNeXt-VINE++は、Livox Mid-360とVelodyne VLP-16の2つのLiDARデータを早期に融合し、それぞれのセンサーの強みを活かす。また、再ランキング機構により、初期検索結果を改善。これにより、農業環境における位置認識の精度が大幅に向上した。
実験結果と性能評価
TEMPO-VINEデータセットを用いた評価では、提案手法が単一センサー手法と比較してRecall@1が20%向上し、再ランキングを含むと30%向上した。特に、Livox Mid-360とVelodyne VLP-16の融合により、Recall@1が61.41%を達成し、従来の最先端手法を大きく上回った。
農業ロボットへの応用と意義
本手法は、農業ロボットの自律走行や作物の管理に直接応用可能。特に、葡萄園の長期間にわたる走行や、季節ごとの環境変化に対応できるため、農業の自動化・効率化に貢献する。また、低コストセンサーでも高い精度を実現するため、広範な現場での導入が期待できる。
限界と今後の課題
本手法は、特定のvineyard環境に特化しており、他の農業環境への適用には調整が必要である。また、再ランキングの計算コストは現状の環境では問題ないが、より高速な処理が求められる場合もある。今後の研究では、より汎用的なモデル構築とリアルタイム処理の最適化が求められる。
日本での適用可能性
日本では、果物の栽培や農業ロボットの導入が進んでいる。本手法は、特に果物の収穫や管理に必要な位置認識精度を提供するため、日本農業現場での導入が期待できる。また、季節ごとの環境変化に対応できるため、長期的な運用にも適している。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Heterogeneous LiDAR Early Fusion and Learned Re-Ranking Strategy for Robust Long-Term Place Recognition in Unstructured Environments – 著者: Judith Vilella-Cantos, Juan José Cabrera, Mónica Ballesta, David Valiente, Luis Payá – 発表日: 2026-06-11 – arXiv ID: 2606.13503v1 – カテゴリ: cs.CV