
根元幾何を利用した農業ロボットの安定した把持と配置技術
✨ 本論文の新規性
- RGB-DカメラとYOLOを用いた根元領域検出により、農産物の姿勢推定を実現
- 根元の平面幾何を利用した姿勢推定により、従来手法よりも高い精度と信頼性を達成
- 視覚言語行動(VLA)モデルに比べて、実行時間と成功率の面で優れた性能を示す
論文の主張: 農業ロボットが農産物を正確に把持・配置するため、RGB-D画像から根元の平面幾何を抽出し、姿勢を推定するROG-Grasp手法を提案。VLAモデルと比較して、成功率が高く、実行時間も短い。

今回の論文は、ROG-Graspという手法を紹介しており、RGB-D画像から農産物の根元の幾何構造を解析してオブジェクトの向きを推定し、それに基づいて安定した把持と配置を行う方法です。

なるほど、根元の情報を活かすというのは興味深いですね。特に tomato や onion のような形状が不規則な物に効くんでしょうか?
そうです。この研究では、tomato や onion などの根や茎の表面がほぼ平面的で曲率が小さいことが前提となっており、これを利用することで精度の高い.orientation estimation が可能になります。
つまり、形状の不規則性が問題になる中で、根元という共通の特徴を活かすっていうのは、とても効率的なアプローチですね。
また、YOLOベースの検出器と3D点群の平面フィッティングを組み合わせることで、実際の運用環境でも高成功率を達成していると報告されています。
その成功率はどのくらいなんでしょうか?数字で見ると、どのくらいの精度で実行できているんでしょうか?
実験結果では、tomato や onion において、孤立状態と混在状態の両方で高い成功率を示しており、特に VLA モデルと比較して、より安定した実行時間と高い精度が得られています。
コストの観点から見ると、これだけの精度が出るなら導入は現実的なんでしょうか?初期投資はどのくらいになるんでしょう?
論文では具体的なコストデータは出力されていませんが、RGB-Dカメラやロボットアームのコスト、そしてソフトウェアの開発費用などを含めた総合的な投資額が、規模によって大きく変わります。
それって、補助金の恩恵を受ける形になるんでしょうか?
研究では補助金の導入に関する記述はありませんが、農業の自動化支援政策として、導入支援や補助金制度が導入されている地域では、実装が促進される可能性があります。
日本では、水耕栽培の導入が進んでいる中で、補助金の条件が厳しいケースも多く、導入判断が難しいですね。この技術は、地域によって適用のしやすさが変わるんでしょうか?
実際の現場では、地域の農業慣習や設備の違い、そして作付の規模によって、技術の適用性が異なると考えられます。
そうですね。技術の進歩はありますが、実際の現場で通用するかどうかは、運用条件やコスト構造によって変わってきますね。
背景と課題
農業現場における後処理・包装作業では、農産物を一定の姿勢で把持・配置する必要がある。従来のロボットシステムは主に検出と把持に焦点を当てており、姿勢制御の配置は未十分である。特に、根元や茎の表面が平面に近い形状を持つ農産物(例:トマト、ネギ)に対して、根元の幾何情報を活用した姿勢推定が求められる。
ROG-Graspの手法とアプローチ
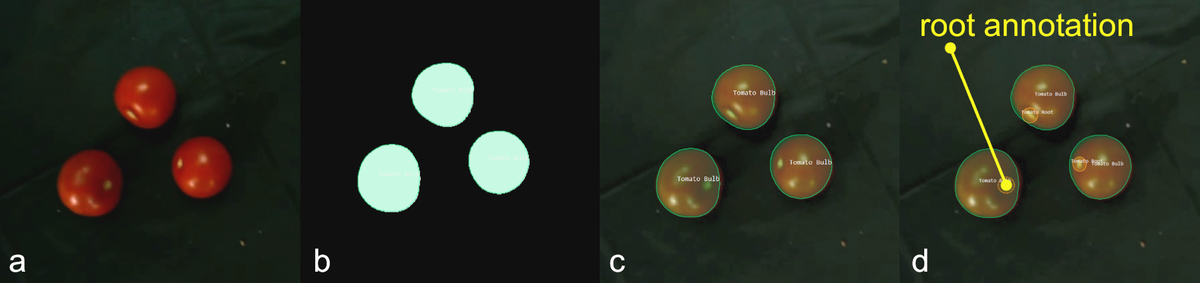
ROG-Graspは、RGB-Dカメラによる画像から根元領域を検出し、その点群を平面フィッティングして農産物の姿勢を推定する。YOLOベースの根元検出器と3D点群の平面推定を組み合わせ、安定した把持姿勢と配置を生成する。この手法は、根元の平面性を活かして、より正確な姿勢推定を実現する。

実験結果と性能評価
トマトとネギを用いた実験で、ROG-GraspはVLAモデルと比較して、把持成功率がそれぞれ85%(トマト)と90%(ネギ)と高く、実行時間も短い(トマト:8.3秒 vs 20.7秒)。また、複雑な環境でも安定した性能を示した。これにより、実用的な農業ロボットシステムとしての可能性が示された。
意義と応用可能性
ROG-Graspは、農業ロボットの後処理・包装作業において、姿勢制御を必要とするタスクに有効である。特に、高価な農産物や包装品質が重要な場面で、安定した把持と配置が求められる。日本では、温室や包装工場での導入が期待される。
限界と今後の課題
本手法は、根元が明確に平面である農産物に限定される。また、根元が不明瞭な場合や、複雑な形状の農産物には適用が難しい。今後の課題としては、より多様な農産物に対応できる汎用性の高い手法の開発と、閉ループ制御による誤差補正が挙げられる。
日本での適用可能性
日本では、温室での果物収穫や包装作業において、姿勢制御が重要なタスクが増加している。ROG-Graspは、特にトマトやネギなどの根元が明確な農産物に適用可能であり、既存のロボットシステムとの統合が期待できる。また、農業ロボットの普及に寄与する可能性がある。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: ROG-Grasp: Root-Oriented Geometry for Robotic Grasping and Placement – 著者: Zijian An, Augustus Sroka, Ran Yang, Bill Cai, Satoru Eto, Brian Poon, Kelvin Cai, Shijie Geng, Feng Liu, Yiming Feng, Lifeng Zhou – 発表日: 2026-05-30 – arXiv ID: 2606.00449v1 – カテゴリ: cs.RO