
実農場でのストロベリー収穫ロボット向け6D姿勢推定データセットの構築とシミュレーションからの実世界転送の検証
📄 論文サマリー
著者:Woojung Son、Won Suk Lee、Zijing Huang 他4名
発表:arXiv(コンピュータビジョン)/2606.11381v1
公開日:2026年06月09日
✨ 本論文の新規性
- 実農場環境で収集されたストロベリーの6D姿勢データセットを初めて公開(12,040枚の画像)
- NVIDIA Isaac Simでレンダリングされた高リアルなシミュレーションデータセットを提供し、ドメインランダム化を実施
- シミュレーションから実世界への転送ギャップを定量的に評価し、バックボーンエンコーダーの性能を比較
論文の主張: ストロベリー収穫ロボットのための6D姿勢推定において、実農場でのデータセットとシミュレーションデータセットを提供し、シミュレーションから実世界への転送性能を定量的に評価した。

今回の論文は、イチゴの収穫を支援するロボットのための6Dポーズ推定に関する研究で、実際の農場でのデータを用いた初めてのデータセットを公開しています。

実際の農場のデータって、それって結構難しいんじゃなかったですか?
おっしゃる通りです。実際の農場では、光の条件や環境が多様で、データの収集が非常に困難です。この研究では、12,040枚の画像を収集し、6Dポーズの正解データを構築しています。
データの量的にもすごく大きな成果ですね。でも、シミュレーションとのギャップって、どう評価されたんですか?
その点について、シミュレーション用のデータセットも用意し、両者を比較しました。結果として、シミュレーションと現実の間には大きなギャップがあることがわかりました。
それは技術の応用性を考慮する上で重要なポイントですね。コスト的にも、現実のデータを用意するのって結構大変そうだけど、精度的には必要なんですか?
はい、特にイチゴのように柔らかい果物を扱う場合、正確なポーズ推定が重要です。誤った角度で掴むと、傷がつく可能性があるんです。
それって、コストの問題も含めて、実際の導入に際しては慎重な検証が必要ってことですか?
そうです。現実の農場環境では、光の変化や植物の姿勢など、多くの変数が影響します。その点を考慮した評価は、今後の技術開発にも重要です。
でも、データ収集って、時間と労力が結構かかるんでしょうし、補助金で対応するケースも出てくるんでしょうか。
研究では、データの構築に膨大な労力がかかることが示されています。しかし、このデータセットは今後の研究者にとっての基準となるものでもあります。
そういう意味で、研究者にとってはすごく貴重なデータセットですね。でも、現場の農家さんにとっては、導入のハードルが高そうですね。
それはそうですが、技術の進歩とともに、コストの低減や導入の容易さが進む可能性も考えられます。この研究は、今後の実用化に向けた第一歩とも言えるでしょう。
この論文を読んだだけでも、技術の可能性は広いけど、現実的な導入には課題もあるってことがよくわかりました。
今回の研究は、実際の現実の条件に即した評価を行うことの大切さを示していると言えるでしょう。
背景と課題
ストロベリーの収穫は高労働集約型であり、ロボットによる自動収穫は未実現のままです。特に柔らかい果物を扱う際には、正確な姿勢推定が不可欠です。しかし、実際の農場環境では6D姿勢の真値データの取得が困難であり、これまでの研究は主にシミュレーションデータに依存していました。本研究では、実際の農場で収集されたストロベリーの6D姿勢データセットを提供し、シミュレーションと実世界のギャップを定量的に評価しました。
手法・アプローチ
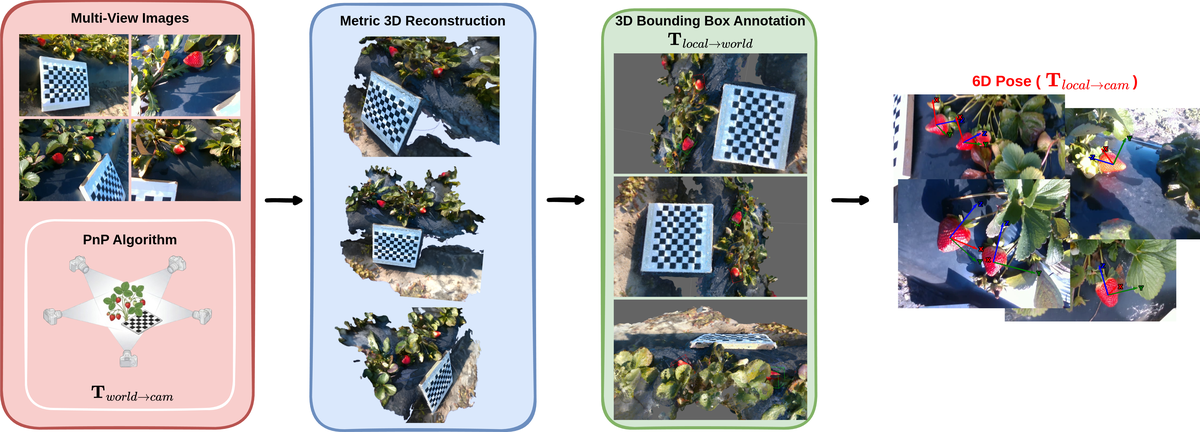
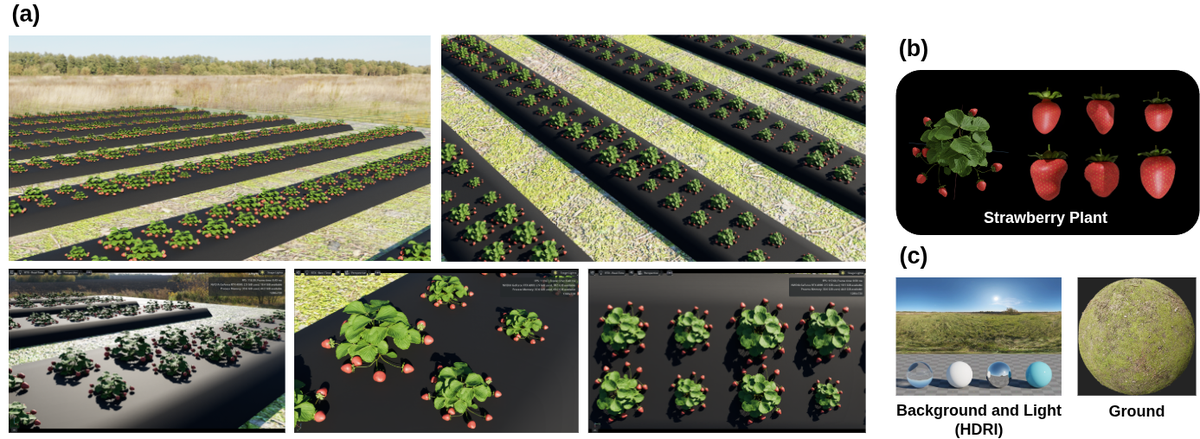
実世界データセットは、Intel RealSense D435iカメラで撮影された動画からPnP法とCOLMAPによる3D再構成を用いて6D姿勢を推定。NVIDIA Isaac Simでは、リアルなHDRI照明と植物の形状変化を含むシーンをレンダリングし、ドメインランダム化を適用。ベースラインとしてResNet-101、ViT-B/16、DINOv2-Bの3つのバックボーンを用いた6D姿勢推定モデルを評価。
実験結果
シミュレーションのみで学習したモデルは、実世界の画像に対して性能が著しく低下しました。一方、10%の実世界データを加えた場合、DINOv2-Bベースラインは平均回転誤差を91.90度から25.00度まで大幅に改善し、IoU@0.5も28%から約85%に向上しました。これは、シミュレーションから実世界への転送が可能であることを示しています。
意義・応用可能性
本研究は、農業ロボティクスにおける6D姿勢推定の実用化に向けた重要な基盤を提供します。特に、実世界での精度向上が確認されたDINOv2-Bモデルは、今後の自動収穫ロボットの開発に直接応用可能です。日本では、温室でのストロベリー栽培が主流であり、本手法はその環境に適応可能と考えられます。
限界と今後の課題
実世界データセットは単一農場でのみ収集されており、環境の多様性に限界があります。また、シミュレーションモデルには表面テクスチャや視覚的詳細の欠如があり、これによりシミュレーションと実世界のギャップが残る可能性があります。今後の課題として、より多様な環境でのデータ収集と、より高精度なシミュレーションモデルの構築が挙げられます。
日本での適用可能性
日本では温室栽培が主流であり、本研究で構築されたデータセットと手法は、温室でのストロベリー収穫ロボットの開発に直接活用可能です。特に、DINOv2-Bモデルの精度向上は、日本における高効率な自動収穫システムの実現に寄与する可能性があります。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: From Simulation to Real-World: An In-Field 6D Pose Dataset and Baseline for Robotic Strawberry Harvesting – 著者: Woojung Son, Won Suk Lee, Zijing Huang, Daeun Choi, Catia Silva, Yu She, Yan Gu – 発表日: 2026-06-09 – arXiv ID: 2606.11381v1 – カテゴリ: cs.CV