

軽量YOLOモデルでトマトの熟度判定と収穫ポイントをリアルタイム検出
📄 論文サマリー
著者:Rajmeet Singh、Manveen Kaur、Shahpour Alirezaee、Irfan Hussain
発表:arXiv(コンピュータビジョン)/2605.27129v1
公開日:2026年05月26日
✨ 本論文の新規性
- YOLO26ベースの新アーキテクチャ「YOLO26-RipeLoc Lite」を導入し、熟度分類と収穫ポイントの同時推定を実現
- 軽量な特徴抽出ネットワークと熟度に特化した注意メカニズムを組み込み、精度と効率のバランスを最適化
- 3段階の学習戦略により、少量データでの過学習を防ぎ、実環境への適応性を向上
論文の主張: 温室トマトの熟度判定と収穫ポイントをリアルタイムで検出する軽量YOLOモデル「YOLO26-RipeLoc Lite」が開発され、95.2%の精度を達成。ロボットの自動収穫に適した技術を提供。

今回の論文は、温室でのトマト収穫を支援するための新しい軽量AIモデルについてのものです。YOLO26をベースに、熟度判定と収穫ポイントの同時検出を実現するアーキテクチャを提案しています。

なるほど、つまり収穫ロボットがトマトを見つけて、どの部分を掴むかまで判断できるってことですね。
はい、その通りです。特に、熟度を分類しつつ、中心座標を出力するという点が特徴的です。パラメータ数は238万、さらに30%の削減で180万にまで抑えられています。
パラメータ数が少なくて済むのは良いですが、精度はどのくらい出るんですか?
熟度別に見て、熟したトマトの検出精度は95.2%、未熟なトマトは90.6%、全体のmAP@0.5は92.9%を記録しています。他のモデルと比較しても、精度と軽量化のバランスが優れています。
それって、実際の温室で使えたんでしょうか?
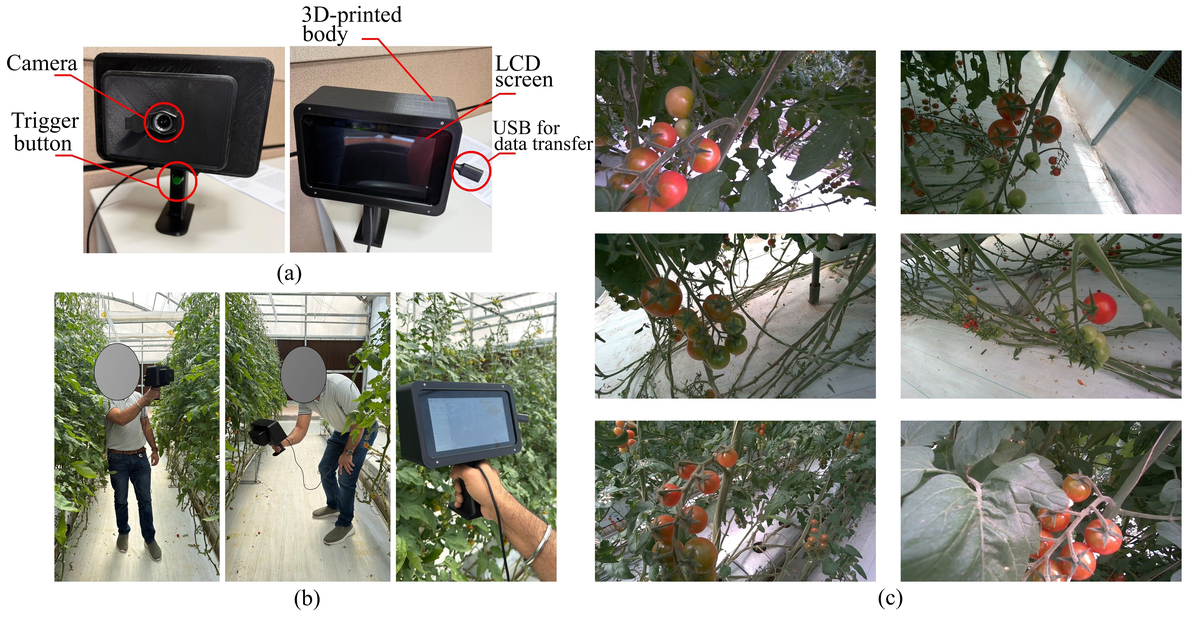
データセットはアブダビのSILAL温室で取得された1500枚の画像を使用しており、実際の環境に近い条件で評価されています。照明条件の変化にも強いとされています。
コスト面ではどうなんでしょうか?導入するには、初期投資が結構かかりそうですね。
その点についても、モデルの軽量さが大きな利点です。端末での実行が可能で、既存のロボットプラットフォームへの組み込みも容易です。
それって、既存のシステムを置き換えるものでもあるんでしょうか?
はい、既存の検出器と比較して精度が高く、かつ軽量なため、既存のロボットに統合しやすい構造となっています。ただし、導入には一定の技術的準備が必要です。
市場規模や導入の可能性についても、ちょっと気になるところですね。
温室栽培の自動化は、労働力不足の背景から注目が集まっており、今後の展開が期待されています。特に、高価な設備に投資する企業向けのソリューションとして、応用が広がりそうです。
今後の展望としては、補助金の導入や政策変更など、環境の変化に注意が必要ですね。
その通りです。技術の進歩とともに、経済的な支援や導入の促進も求められるでしょう。今後、実際の導入事例が増えていくと良いですね。
背景と課題
温室でのトマト収穫は労働集約型であり、効率的な自動化が求められている。従来の手法では、熟度の判別精度や収穫ポイントの定位精度が不十分な場合が多く、リアルタイムでの運用が難しい。特に、色の変化や葉の遮蔽が混在する環境では、検出精度が低下する傾向がある。
手法・アプローチ
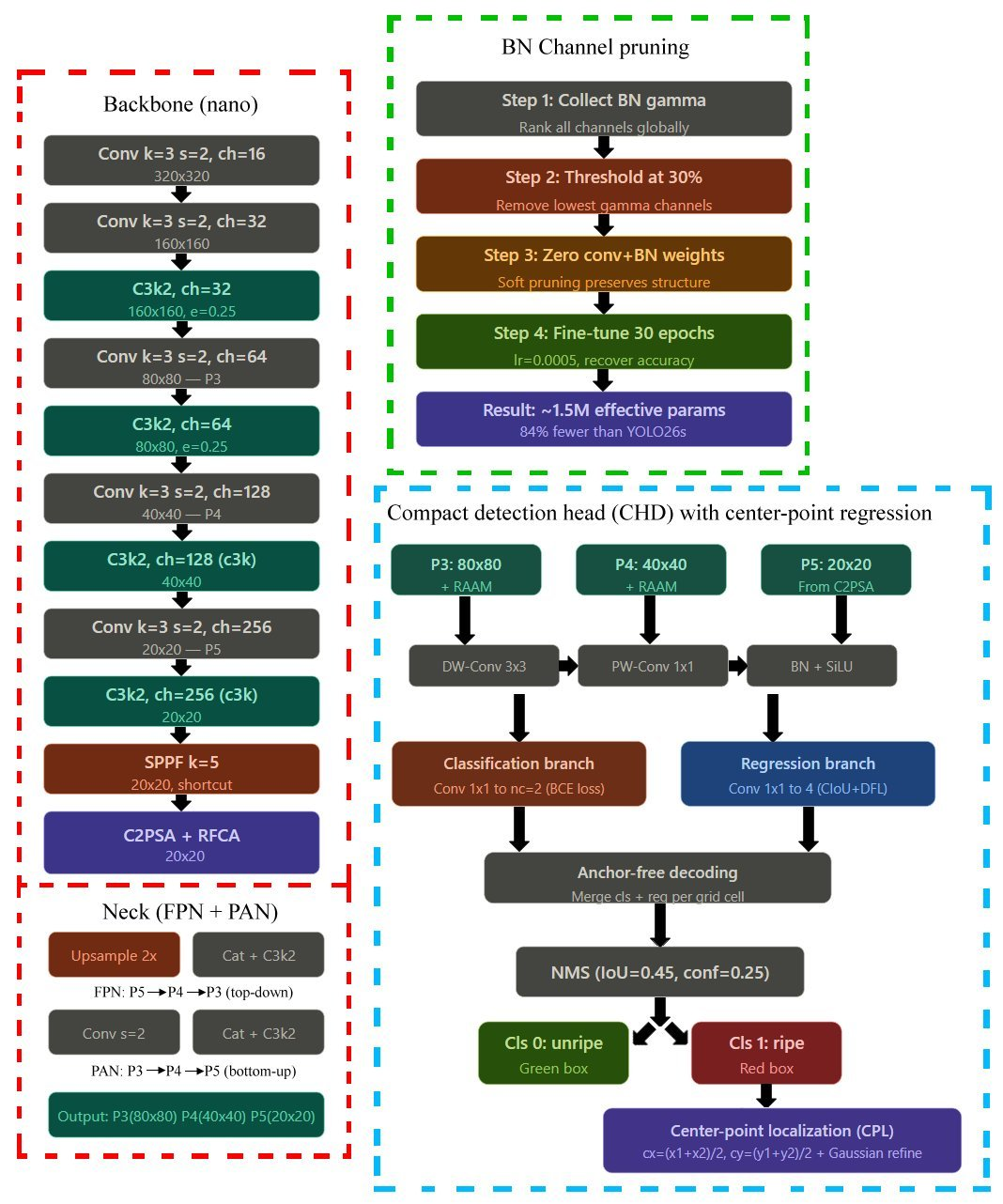
本研究では、YOLO26をベースとした軽量モデル「YOLO26-RipeLoc Lite」を提案。特徴抽出には軽量なLFPN、熟度判別のためのRAAM、そして収穫ポイントを同時に推定するCDHを導入。これにより、熟度分類精度95.2%、収穫ポイントの定位精度も高い性能を実現。
実験結果
提案モデルは、1,500枚の画像を用いたデータセットで評価された。熟度判定のmAP@0.5は95.2%(未熟:90.6%)、全体のmAPは92.9%を達成。パラメータ数は2.38Mで、既存の軽量モデルと比較して精度と効率のバランスが優れている。さらに、30%のチャネル削減により1.8Mにまで削減可能で、精度低下は最小限に抑えられている。
意義・応用可能性
本モデルは、温室での自動収穫ロボットの制御に直接応用可能。熟度に応じた選択的収穫が可能となり、品質管理の精度向上と労働力の削減が期待できる。特に、ロボットのエッジコンピューティング環境での実装が可能で、実用性が高い。
限界と今後の課題
本モデルは温室環境に特化しており、屋外や異なる作物への適用には限界がある。また、少量のデータセットでの学習に特化しており、より多くのデータを用いた学習による精度向上が期待できる。さらに、複雑な遮蔽状況下での安定性向上も今後の課題である。
日本での適用可能性
日本の温室農業では、トマトの自動収穫が注目されており、本モデルは既存のロボットシステムへの統合が可能。特に、屋内での安定運用が求められる環境において、軽量かつ高精度な検出が重要視されるため、日本市場での導入が期待できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: YOLO26-RipeLoc Lite: A lightweight architecture for tomato ripeness detection and picking point localization in greenhouse robotic harvesting – 著者: Rajmeet Singh, Manveen Kaur, Shahpour Alirezaee, Irfan Hussain – 発表日: 2026-05-26 – arXiv ID: 2605.27129v1 – カテゴリ: cs.CV