
ドローンシミュレータDroneulatorが農業ロボティクスに与える影響
📄 論文サマリー
著者:Jacob Swindell、Michael Lowen、Marija Popovic、Riccardo Polvara
発表:arXiv(ロボティクス)/2605.23386v1
公開日:2026年05月22日
✨ 本論文の新規性
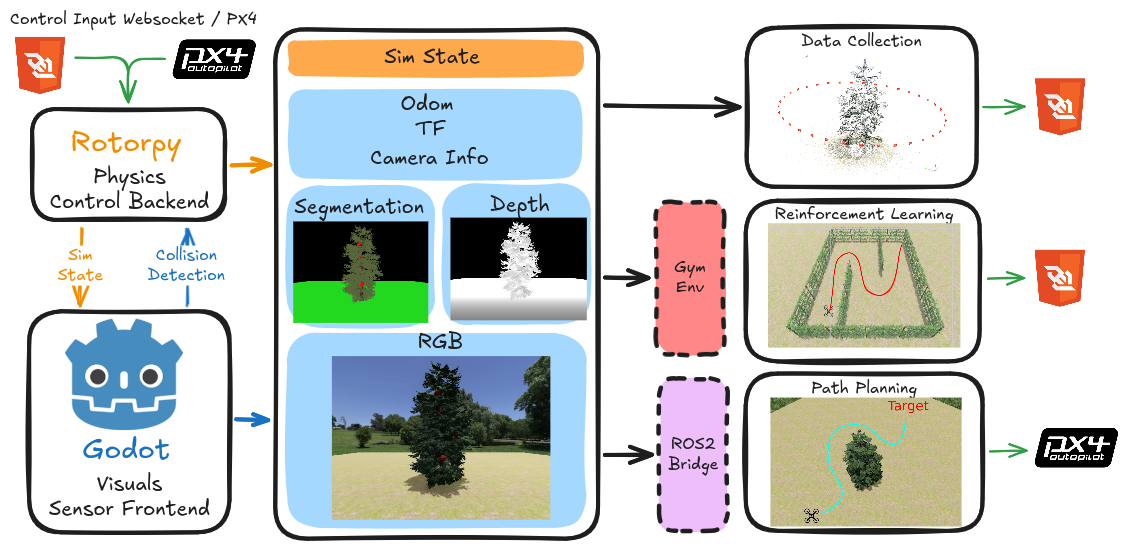
- RotorPyとGodot 4を統合したポータブルな農業ドローンシミュレータを構築
- PX4とWebSocketの二重コントロールパスを実装し、ROS 2との連携を可能に
- 視覚・深度センシングとリアルタイム制御を統合した一元化されたシミュレーション環境を提供
論文の主張: 農業用途向けに設計されたドローンシミュレータDroneulatorは、3Dシーン、リアルな飛行力学、ROS 2との連携を統合し、検査、計画、強化学習の3つのワークフローをサポートする。

今回の論文は、農業用途に特化したドローンシミュレーターの開発についてです。RotorPyとGodot 4を組み合わせた構成で、PX4との連携も可能となっています。

なるほど、PX4と連携できるというのは、実際の運用にも繋がるんでしょうか。特に農業現場で使われているドローンの制御との連携は重要ですよね。
はい、その通りです。このシミュレーターは、実際の農業ワークフローに対応するための設計がされており、例えば木々の間を飛行する際の障害物回避なども再現可能です。
木々の間って、結構難しいですよね。視覚情報と衝突回避のバランスって、技術的に難しいところもあるんでしょうけど。
その通りです。論文では、COLMAPを使って3D再構築や、EGO-Plannerによるローカルプランニング、そして強化学習を使った障害物回避の実験も報告されています。
強化学習って、それ自体が結構高コストじゃないですか。コスト面で導入は難しいかもしれませんね。
確かに、コストの問題はありますが、シミュレーション上での学習を活かすことで、実機での試行錯誤を減らす効果があります。
それなら、導入のハードルを下げられるのはメリットですね。ただ、運用の際の補助金の有無とか、政策面での影響も気になるところです。
その通りです。特に補助金に依存するプロジェクトが多い中、政策変更によって導入の可否が変わる可能性もあります。
そうですね。補助金がなくなると、導入の判断が難しくなりますよね。でも、コストの回収期間を短くする工夫ができたなら、期待はできますね。
研究では、低遅延のセンシングや安定した深度推定が可能であることが示されています。これにより、実際のデータ収集の効率性も向上します。
データの収集効率って、農業現場ではとても重要な要素ですよね。効率的でないと、コストが高くなってしまいますから。
また、このシミュレーターは、ROS 2との連携も可能で、既存のツールチェーンとの統合が比較的容易です。
ROS 2との連携って、導入のしやすさが上がるってことですね。これはとても重要なポイントです。
背景と課題
農業におけるドローンの活用は、果樹の検査や作物の観測など、複雑な環境での自律飛行が求められる。しかし、現行のシミュレータは描画品質、飛行力学、ROS 2との統合、学習ワークフローのサポートなど、一つのツールですべてを満たすのは困難である。特に、農業用途では、葉の間を飛行する際の障害物回避や、3D再構成に必要な高品質な画像収集が課題である。
手法・アプローチ
Droneulatorは、RotorPyによる多Rotorの飛行力学、Godot 4による3Dレンダリング、ZenohによるROS 2互換センシングパイプライン、そしてPX4とWebSocketの二重コントロールインターフェースを統合した。これにより、シミュレーション環境をポータブルにし、複数の農業ワークフローに対応可能にした。特に、視覚・深度データと状態情報をリアルタイムで同期し、ROS 2/PX4と連携できる点が特徴である。
実験結果
3つの農業ワークフローを評価した結果、Droneulatorは、COLMAPによる3D再構成において、54枚の画像で平均0.72ピクセルの再投影誤差を達成し、精度と効率のバランスを取ることができた。また、EGO-Plannerによる障害物回避では、最小クリアランス0.28mで目標到達率100%を達成。強化学習では、SACアルゴリズムによる50,000ステップの学習で、10/10の評価で成功を収めた。

意義・応用可能性
Droneulatorは、農業ロボティクスの研究・開発を加速させる可能性を秘めている。特に、果樹の検査や作物の観測など、複雑な環境下での自律飛行をシミュレーションし、実機への転送を容易にする。日本では、温室や果樹園でのドローンの活用が進んでいるため、このシミュレータは実用的なツールとして期待できる。
限界と今後の課題
現状では、風の影響やセンサーのノイズを再現する機能が不足しており、シミュレーションと現実のギャップが存在する。また、高密度な飛行軌道では制御の限界が見られ、より高速な動作には制御パラメータの調整が必要である。今後の課題として、マルチエージェントシミュレーションやリアルタイム超過の実行速度の向上が挙げられる。
日本での適用可能性
日本では、果樹園や温室でのドローンの活用が進んでいるため、Droneulatorは農業ロボットの開発・テストに非常に有用である。特に、葉の間を飛行する際の障害物回避や、3D再構成の精度向上に貢献する可能性がある。また、教育現場でのドローンシミュレーションにも応用が期待できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Droneulator: A Portable UAV Simulator for Agricultural Workflows with RotorPy and Godot 4 – 著者: Jacob Swindell, Michael Lowen, Marija Popovic, Riccardo Polvara – 発表日: 2026-05-22 – arXiv ID: 2605.23386v1 – カテゴリ: cs.RO