
農業ロボットの安全を支える新技術:動くカメラ向け異常検出手法VMTAD
📄 論文サマリー
著者:Théo Biardeau、Anne-Sophie Capelle-Laizé、Salwan Alwan、David Helbert
発表:arXiv(ロボティクス)/2606.26151v1
公開日:2026年06月23日
✨ 本論文の新規性
- 動く農業ロボットの視覚環境に適したTransformerアーキテクチャを提案。従来手法では対応が困難なカメラ移動による視覚的変化を補正。
- FIFOキューを用いたメモリ機構を導入し、時間的コンテキストを保持しながら計算コストを線形に抑える。
- ラベルなしで学習可能な完全非監視型の異常検出手法を実装。農業現場の多様な障害物を検出可能に
論文の主張: 農業ロボットが移動中に撮影する動画を用いて、障害物を検出する非監視型TransformerモデルVMTADを提案。LiDARでは検出できない下部の障害物も検出可能で、リアルタイム推論が可能。

今回の論文は、自律走行農業ロボットにおける障害物検知のための新しい手法を提案するもので、特にカメラベースのアンサンブル学習を用いた手法です。

なるほど、LiDARでは検出できない下部の障害物も検出できるってことですね。特に農業環境で重要なポイントですよね。
はい。この研究では、Transformerアーキテクチャをベースにしたメモリモジュールを導入し、時間的コンテキストを活かして動的な環境でも検出できるようにしています。
メモリモジュールって、過去のフレームを保持して処理するってことですか?
そうなんです。FIFOベースのキューを使って、過去の画像情報を効率的に保持しながら、異常を検出します。これにより、カメラが動く中でも安定した結果が得られています。
データのラベルが不要ってのは強いですね。実運用のコスト削減にもつながるかもしれません。
その通りです。訓練には正常な画像のみを使用し、学習過程で異常を自動的に識別します。これは、農場の環境に応じて柔軟に対応できる大きな利点です。
性能の数字見てみましたが、AUROCが0.973って結構高いですね。リアルタイム性も14ミリ秒って、本当に安全に運用できるレベルなんですか?
はい。実験では、Grillonというロボットで評価されており、停止距離の計算も含まれているので、実際の安全性を考慮した結果です。
それは重要な検証ですね。でも、この技術が広がるには、コストや導入のハードルも気になるところですよね。
研究では、軽量版のモデルも提案されており、実用化の可能性は高いとされています。ただ、現場での適用には、農業ロボットの全体的な構成や運用環境なども考慮が必要です。
そうですね。補助金などがあれば導入しやすいかもしれませんが、自社で運用する分には、ROIの見通しが難しいかもしれませんね。
確かに、技術の進歩はありますが、導入の実際にはコストや人件費、運用の複雑さなど、さまざまな要素が絡んできます。
これは、業界の議論が分かれるところですね。技術的には優れているものの、実務にはまだ課題があるようです。
背景と課題
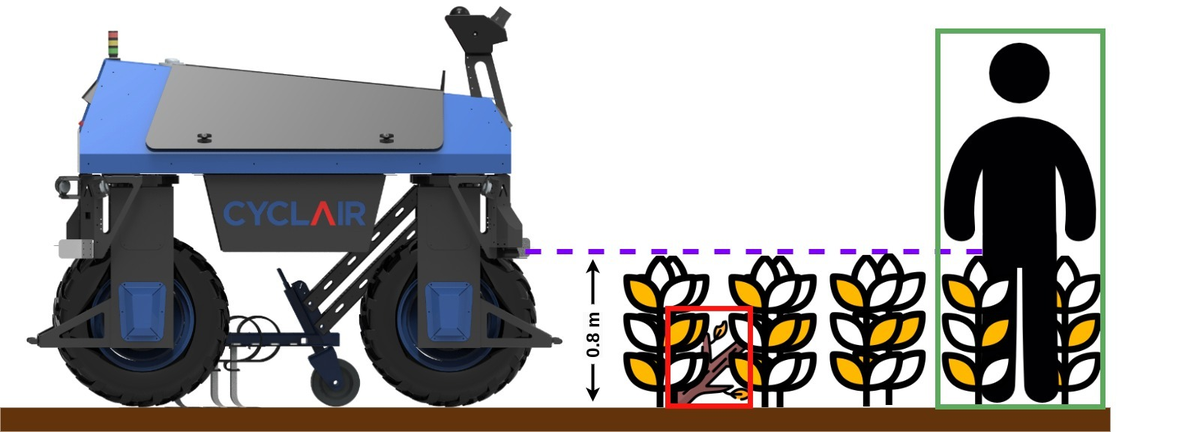
自動運転農業ロボットは効率化に貢献しているが、従来のLiDARセンサでは植物の下部に隠れた障害物を検出できないという課題がある。また、監視学習ベースの手法は訓練データに含まれない障害物には対応できない。本研究では、動くカメラ環境に適した非監視型の異常検出手法を提案する。
手法・アプローチ
提案手法はVideo Memory Transformers for Anomaly Detection(VMTAD)と呼ばれる。Transformerベースの構造に、FIFOキューを用いたメモリ機構を組み合わせ、時間的コンテキストを保持しながら異常を検出する。特徴抽出にはEfficientNetを用い、再構成誤差をcosine similarityで評価する。
実験結果
Grillonロボットを用いた実験で、油菜種畑での検出率AUROCが0.973、セグメンテーションAUROCが0.997を達成。軽量版VMTAD-B0は推論時間14msで実現し、ロボットの停止距離内での安全運用が可能。

意義・応用可能性
本手法は、農業ロボットの安全性を高めるためのカメラベースの安全層として有望。LiDARの限界を補完し、農業現場の複雑な環境に対応できる。特に、下部に隠れた障害物を検出する点で、従来技術と比較して優れた性能を示す。
限界と今後の課題
本手法は、訓練データが正常な状態のみであることを前提としているため、異常な状況の事前学習が困難。また、動画の長さやカメラの動きに依存するため、より広範な環境での適用には課題がある。今後の研究では、より多様なデータセットでの検証と、リアルタイム性のさらなる向上が求められる。
日本での適用可能性
日本では、畑の広さや作物の種類が多様なため、本手法の柔軟性が評価される。特に、移動中のロボットが作物の下部に隠れた障害物を検出できる点が、日本農業の安全確保に貢献する可能性がある。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Unsupervised Memory-Enhanced Video Transformers: Obstacle Detection for Autonomous Agricultural Rover – 著者: Théo Biardeau, Anne-Sophie Capelle-Laizé, Salwan Alwan, David Helbert – 発表日: 2026-06-23 – arXiv ID: 2606.26151v1 – カテゴリ: cs.RO