
ROS 2とMQTTによる温室ロボット連携のクラウド基盤構築
📄 論文サマリー
著者:F. Cañadas-Aránega、M. Muñoz、J. C. Moreno、J. L. Blanco-Claraco
発表:arXiv(ロボティクス)/2606.22682v1
公開日:2026年06月21日
✨ 本論文の新規性
- ROS 2とMQTTを統合したクラウドベースのロボット間通信アーキテクチャを提案、温室環境における安定性とスケーラビリティを実現
- 視覚的検出結果を軽量なメタデータに変換し、帯域幅を抑えたリアルタイム協調を実現
- FIWAREプラットフォームとMQTTを活用した、温室モデル即サービス(GMaaS)の実現に向けた新しい手法を示した
論文の主張: 地中海型温室環境におけるロボット間通信と人間との協調を実現するため、ROS 2とMQTTを統合したクラウドアーキテクチャを提案。視覚情報の軽量化とリアルタイムデータ共有により、複雑な遮蔽環境下でも安定した自律動作を実現。

今回の論文では、地中海式温室におけるロボット同士や人間とロボットの協調動作を支える、クラウドベースの通信アーキテクチャについて紹介しています

なるほど、つまりROS 2とMQTTを組み合わせて、温室での通信を安定化させるってことですね
はい、その通りです。特に、温室の中では狭い通路や植物の密集、金属構造による電波の遮蔽が問題で、従来のロボットフレームワークではノード発見や遅延が起きやすかったんです
それって、実際の現場で運用するには厳しいんでしょうか
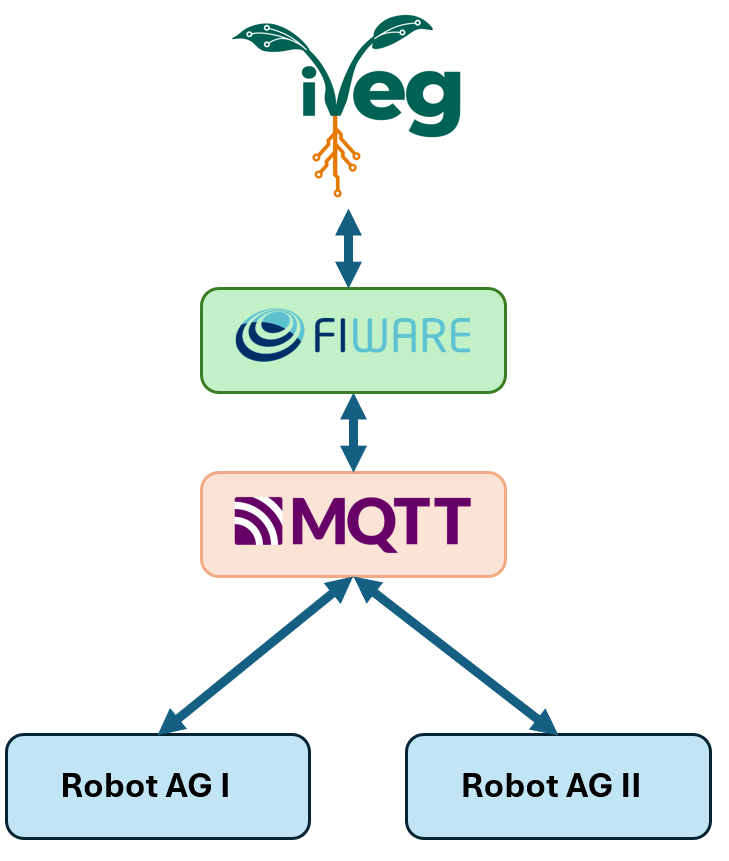
そうです。この研究では、ROS 2をエッジコンピューティングプラットフォームとして使い、MQTTを通じてiVegというDSSと連携させています。これにより、高精度なデータをリアルタイムで共有できるようになります
なるほど、データの共有がスムーズになるってことですね。コスト面ではどうなんでしょう
このアーキテクチャは、既存のロボットシステムとの互換性を保ちながら、クラウド側での統合を実現しています。研究ではシミュレーション環境と実際の温室で検証されており、接続の持続性とデータの完全性が確認されています
それはいいですね。でも、これって導入するには初期費用がかかるんでしょうか
その点については、クラウドベースの設計でハードウェアの追加コストを抑えつつ、拡張性を高める工夫がされています。ただ、既存のインフラとの統合には工夫が必要です
なるほど、技術的には実現できそうだけど、導入のハードルがあるってことですね
はい。また、このアーキテクチャは「Greenhouse Models as a Service(GMaaS)」という概念の基盤となっています。つまり、温室のモデルをサービスとして提供するという新しいビジネスモデルも示唆されています
そうか、それって農業のDXの方向性としては面白いですね。ただ、補助金が前提のプロジェクトが多い中では、政策の変化に左右されてしまうかもしれませんね
その通りです。特に、補助金や支援制度に依存する形になる場合、政策変更によって導入の見通しが変わることもあります。しかし、このアーキテクチャは柔軟性を持ち、既存システムとの連携も可能なので、実装の選択肢として広がるのではないでしょうか
それは面白いですね。業界では賛否あるところですが、技術的には進歩しているって感じですね
そうですね。この研究は、ロボットの自律性と協調性のバランスをとる上で重要な前進であり、今後の農業の自動化や効率化の可能性を示唆しています
背景と課題
地中海型温室は狭い通路と密集した作物により、従来のロボット通信技術に課題がある。特に、金属構造物や植物による信号遮蔽が通信の安定性を損なう。本研究では、これらの課題を解決するため、ROS 2とMQTTを統合したクラウド基盤を構築。これにより、ロボット間のリアルタイム協調と人間との安全な共存が可能になる。
手法・アプローチ
本研究では、ROS 2をエッジコンピューティングプラットフォームとし、MQTTを介してFIWAREプラットフォームと連携するハイブリッドアーキテクチャを構築。ロボットの視覚検出結果をJSON形式の軽量メタデータに変換し、リアルタイムで共有することで、帯域幅を抑えた通信を実現。このアーキテクチャにより、ロボットは人間の位置情報をリアルタイムで把握し、安全に動作できる。
実験結果
実験では、AgroConnect温室で構築されたシミュレーション環境と実際の温室でテスト。結果として、MQTTによる通信が安定し、ロボット間のデータ共有がリアルタイムに実現できた。特に、視覚検出結果を軽量メタデータに変換することで、帯域幅の制限下でも高精度な協調動作が可能となった。また、人間の位置情報がリアルタイムに共有され、ロボットが安全に動作することを確認した。

意義・応用可能性
本研究のアーキテクチャは、温室でのマルチロボット協調動作を実現するための基盤となる。特に、視覚情報を軽量化することで、帯域幅の限られた環境でもリアルタイム通信が可能となり、農業現場での自律性と安全性の向上に寄与する。また、FIWAREとの連携により、将来的なIoT統合や意思決定支援システムへの応用も期待できる。
限界と今後の課題
本研究では、シミュレーション環境と実際の温室での検証を行ったが、より多くのロボットや複雑な環境での実験が必要である。また、視覚検出の精度向上や、より多くのセンサーとの統合も今後の課題である。さらに、IoTとロボットの統合におけるセキュリティ対策も重要視される。
日本での適用可能性
日本では温室農業が広く普及しており、特にトマトや野菜の栽培において、自律型ロボットの導入が進んでいる。本研究のアーキテクチャは、日本の温室環境に適応可能であり、特に遮蔽が激しい地域や、複数ロボットが協調する必要がある場面で有効である。また、農業IoTの普及に伴い、将来的なシステム統合が期待できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Integrated cloud-based architecture for robot-robot and human-robot collaboration using ROS 2–MQTT in Mediterranean Greenhouses – 著者: F. Cañadas-Aránega, M. Muñoz, J. C. Moreno, J. L. Blanco-Claraco – 発表日: 2026-06-21 – arXiv ID: 2606.22682v1 – カテゴリ: cs.RO