

今回は、Vinobotと呼ばれる地上移動型車両と、Vinoculerと呼ばれる移動式観測塔を用い、植物の生育を管理するシステムを紹介します。大規模農場を中心に、植物の生育管理の省力化への貢献が期待される技術です。
ストレスと収量の不安定性
植物は、多様な生物学的ストレス(病気・害虫等)や、非生物学的ストレス(干ばつ、高温、低温、肥料成分の欠乏等)の影響を受け、生育不良を引き起こす可能性があります。また、植物の生育条件と収量は密接に関連しており(1)、生育条件の悪化は、減収や食糧供給の不安定性の原因となる可能性があります。今回は、トウモロコシおよびソルガムにおける、植物管理システムを紹介しますが、このようなシステムが実用化されれば、植物の生育状況の把握が容易になり、生育条件の改善や収量の向上へとつながる可能性があります。
“地上移動型車両と移動式観測塔がタッグを組んで、植物を見守る”
今回は、アメリカミズーリ大学の研究グループが開発した、植物の生育管理システムを紹介します。
このシステムの最大の特徴は、Vinoculerと呼ばれる観測塔と、Vinobotと呼ばれる自律移動型車両の2つのシステムが協働して、植物を管理する点です。
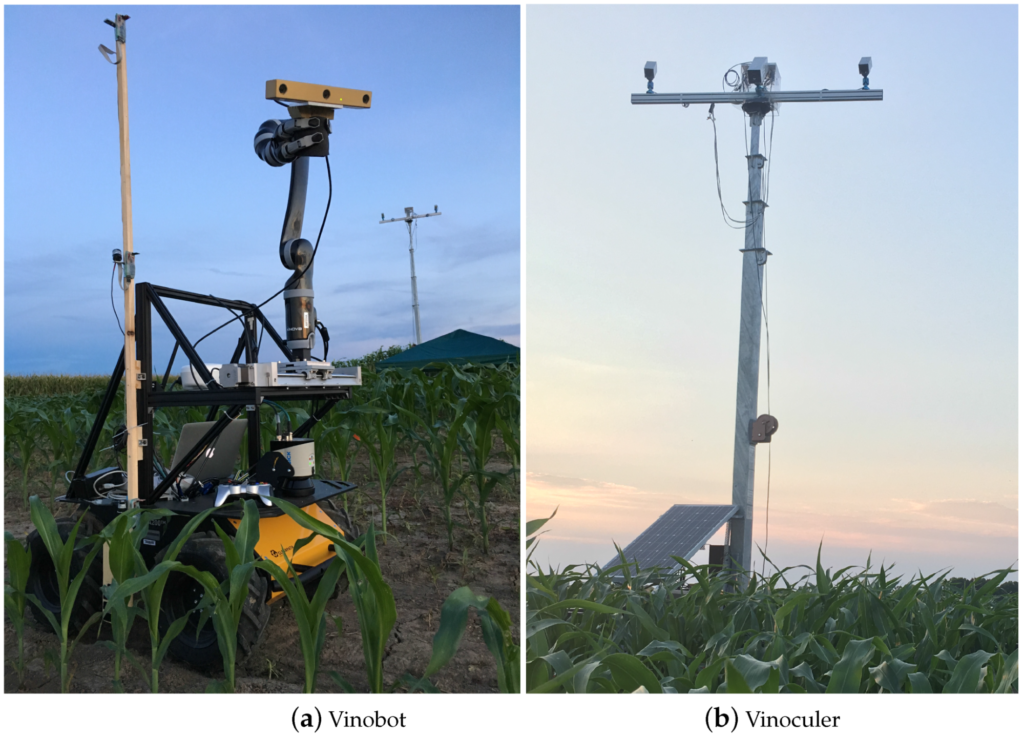
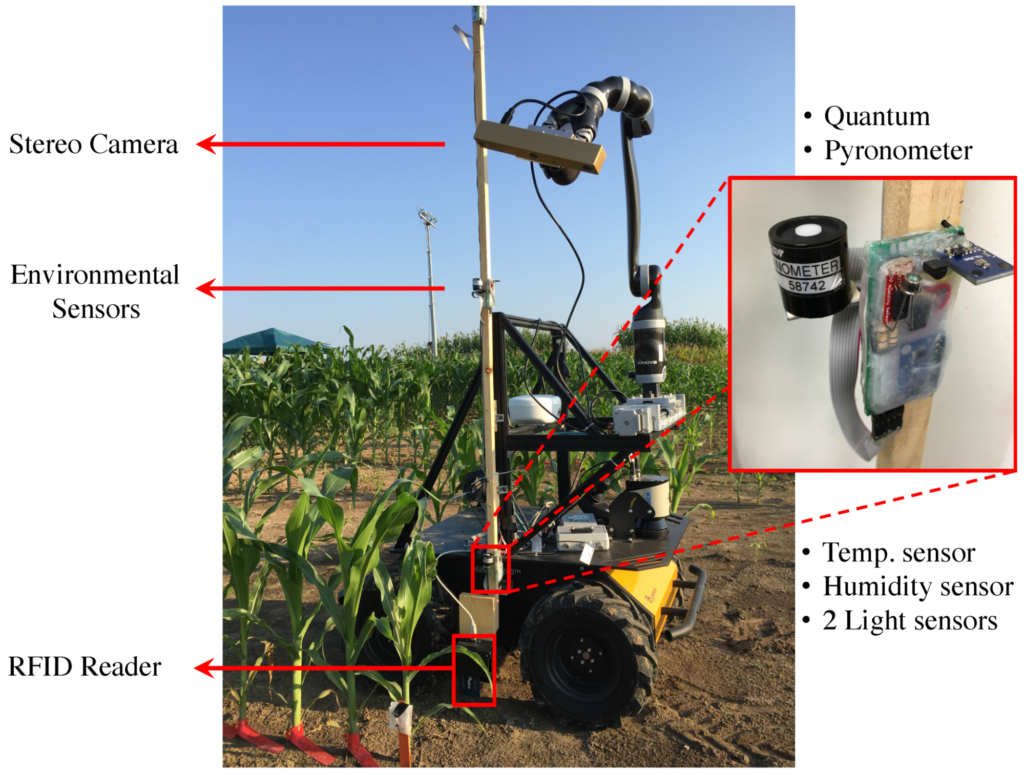
図1・2より、左上がVinobot、右上がVinoculer、下がVinobotの機能詳細
まず、Vinoculerは、圃場の中央から、360度回転可能な、RGBカメラとIRカメラ(葉温や土壌温度を測定できる)を用い、植物体の葉面積、草丈や成長率などの植物体の生育状況や、地温等の生育環境を測定します。Vinoculerにより、ストレスを受けている可能性のある領域が見つかると、Vinobotがその領域へと移動します。
Vinobotは、温湿度や光強度を測定するとともに、植物の草丈や葉面積指数(LAI)を、さらに詳しく測定していきます。
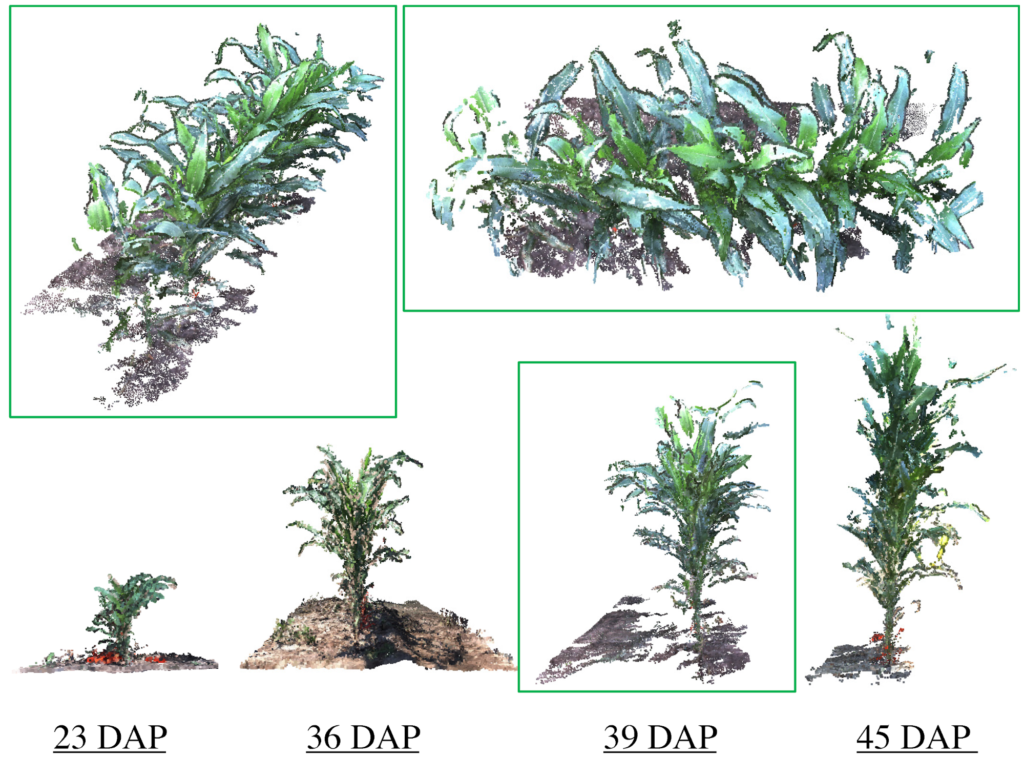
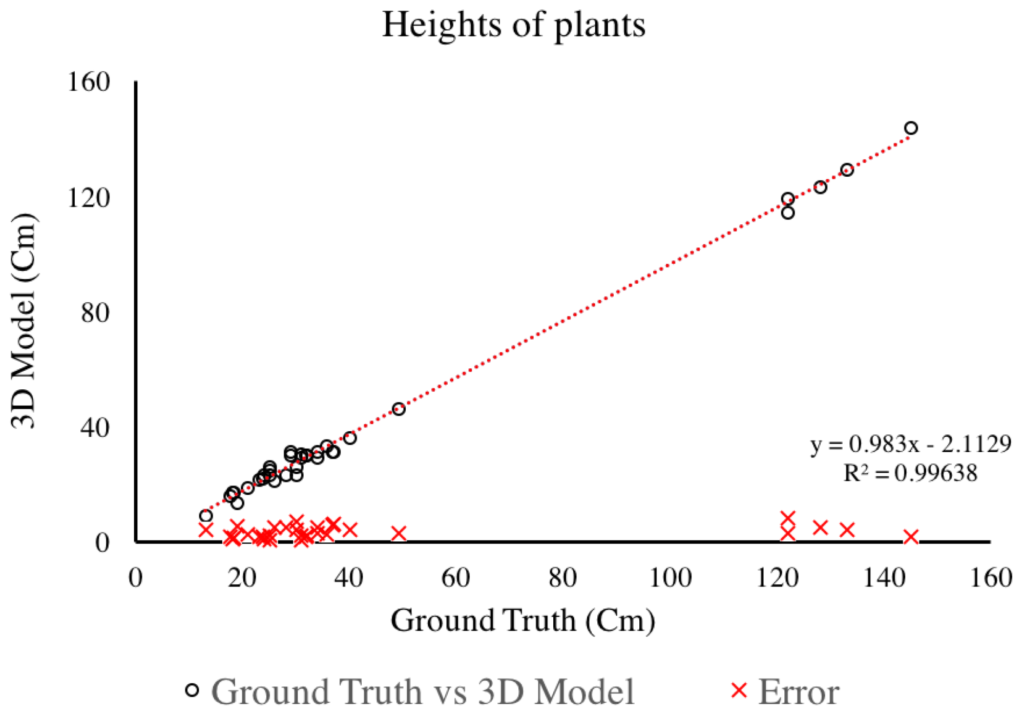
トウモロコシやソルガムにおいて、草丈をVinobotで測定したところ、人間が測定した結果と比べ、0.5cm以内の誤差であり、手動測定による許容精度を下回るレベルの高精度を実現しました。また、遠方からの測定となるVinoculerでも、誤差は2.36cmと、高い精度で、植物の草丈を、自動で測定することを可能としました。
また、植物の生育状況の尺度として、葉面積指数(LAI)がよく用いられます。なお、非破壊的にLAIを測定する方法として、LAI-2000と呼ばれる専用の機器を使用する方法が知られていますが、葉の重なり合いを正しく評価できず、LAIが過小評価される可能性が指摘されています。実際にVinobotでLAIを測定したところ、LAI-2000の結果と比べ、重なり合った葉を正しく検出できるようになり、より正確なLAIが測定可能になったことが報告されていました。
コメント
20世紀における農業は、一代雑種をはじめとする、多収量品種の利用により、世界の人口増加に対応してきました(2)。一方、多収量品種の利用による欠点として、過剰施肥が原因となり、塩類集積等による耕作不能な土地も広がっているのが現状です(3)。さらに、地球温暖化を含めた環境変動による、非生物的ストレスの増加により、食糧生産に悪影響を及ぼす可能性があります(4)。そのため、21世紀の農業では、食糧の安定生産・供給を達成するため、省力的に植物の生育状況を把握し、ストレスとなる原因を明らかにし、収量向上(収量損失をなくす)を目指していくことが、1つの課題となるものと考えられます。
今回紹介した、植物管理システムでは、植物の草丈や葉面積指数といった、植物の生育に関わる情報を自動で収集することが可能であるとともに、植物の生育に関わる環境条件に関する情報を自動的に取得することが可能です。これらの条件は、手動で測定することも可能ですが、多くの時間を要します。一方、今回のようなシステムをベースに、自動で植物体の生育状況を管理し、生産者に異常を通知するシステムが実用化できれば、農作物生産における収量の安定化と、生産の省力化を共に達成することが可能となると考えられます。今後、地球規模の環境変動の影響を受ける可能性のある農作物生産に対し、さらに、技術開発が進み、広く利用されることを期待したい技術です。
今回紹介した論文
Ali Shafiekhani, Suhas Kadam, Felix B. Fritschi and Guilherme N. DeSouza. Vinobot and Vinoculer: Two Robotic Platforms for High-Throughput Field Phenotyping. Sensors 17 (1): 214. 2017. CC-BY 4.0.
(今回記事内の“地上移動型車両と移動式観測塔がタッグを組んで、植物を見守る”およびその他紹介した図表は、上記論文のデータ等を一部抜粋・改変したものを記載しています。)
論文オープンアクセスURL:https://www.mdpi.com/1424-8220/17/1/214
参考文献
- (1)小麦の基本的な栽培技術https://www.maff.go.jp/j/seisan/gijutsuhasshin/attach/pdf/komugi-2.pdf
- (2)藤巻宏.緑の革命とその後.熱帯農業44(3): 206-212. 2000.
J-stageよりダウンロード可能https://www.jstage.jst.go.jp/article/jsta1957/44/3/44_3_206/_article/-char/ja/ - (3)特集:食料危機は克服できるか 2009年6月号 ナショナルジオグラフィック NATIONAL GEOGRAPHIC.JP
https://natgeo.nikkeibp.co.jp/nng/magazine/0906/feature01/_03.shtml - (4)(1)地球温暖化対策の加速化 ア 地球温暖化による食料生産への影響:農林水産省https://www.maff.go.jp/j/wpaper/w_maff/h19_h/trend/1/t1_1_2_01.html