
強化学習でロボットの高品質軌跡を自動生成、農業ロボットの学習を加速
📄 論文サマリー
著者:Zijian Zhu、Menglin Zou、Zhuang Li、Yaojie Tu、Xinhai Sun
発表:arXiv(ロボティクス)/2605.30957v1
公開日:2026年05月29日
✨ 本論文の新規性
- 強化学習ポリシーを軌跡生成のためのデータエンジンとして活用、従来の制御ロボットとは異なるアプローチ
- VLMとDINOを組み合わせた言語駆動型オブジェクト認識により、シミュレーションから実機への転送を効率化
- 人間の操作によるデータ収集に代わる自動軌跡生成により、農業ロボットの訓練効率を大幅に向上
論文の主張: RDGenは強化学習を用いて高品質なロボット軌跡を自動生成するフレームワークであり、VLAモデルの学習に適したデータを提供することで、農業ロボットの制御性能を向上させる。

今回の動画では、RDGenという手法について紹介されています。これは、強化学習を使ってロボットの高品質な行動データを自動生成する仕組みです。

なるほど、つまりロボットの訓練データを人手で作るのではなく、AIが自動で生成するってことですね。
はい、まさにその通りです。従来は人間の操作でロボットを動かしてデータを収集していたのですが、その方法は労力が大きく、スケール性に課題がありました。
それって、コスト面でも大きなメリットあるんでしょうか?
研究では、RDGenによって得られた軌道は人間による操作よりも滑らかで、性能も高いと報告されています。
それって、農業の分野にも応用できるかもしれませんね。例えば、作物の収穫ロボットの訓練データ生成に。
そうですね。特に、データの質に敏感なVLA(ビジョン・ランゲージ・アクション)モデルの学習には効果的です。
ただ、初期投資の回収期間が長くなる可能性もあるんでしょうか。
その点は、確かにコスト面での検討が必要です。ただ、長期的には人手によるデータ生成から解放されることで、運用コストの削減も期待できます。
また、規模感の問題も大きいですよね。小規模農家では導入しにくいかもしれません。
そうですね。小規模な農業では、コスト対効果の見通しが立たないことも多いです。
でも、補助金の支援があるとすれば、導入の可能性も広がるかもしれませんね。
そうですね。政策による支援がある場合、導入のハードルは下がるかもしれません。
ということは、この技術は、補助金前提の導入が前提の分野では特に有効そうですね。
その通りです。補助金の導入が前提である場合、導入の判断が変わるかもしれません。
背景と課題
Vision-Language-Action(VLA)モデルは、ロボットの一般化制御に有望な手法として注目されているが、その性能は高品質なロボット軌跡データの可用性に大きく依存する。現在のロボット学習では、人間による遠隔操作によるデータ収集が主流だが、これは手間がかかる上にスケール性に課題がある。本研究では、シミュレーションから実機へと転送された強化学習ポリシーを用いて、高品質な軌跡を自動生成するRDGenを提案する。
手法・アプローチ
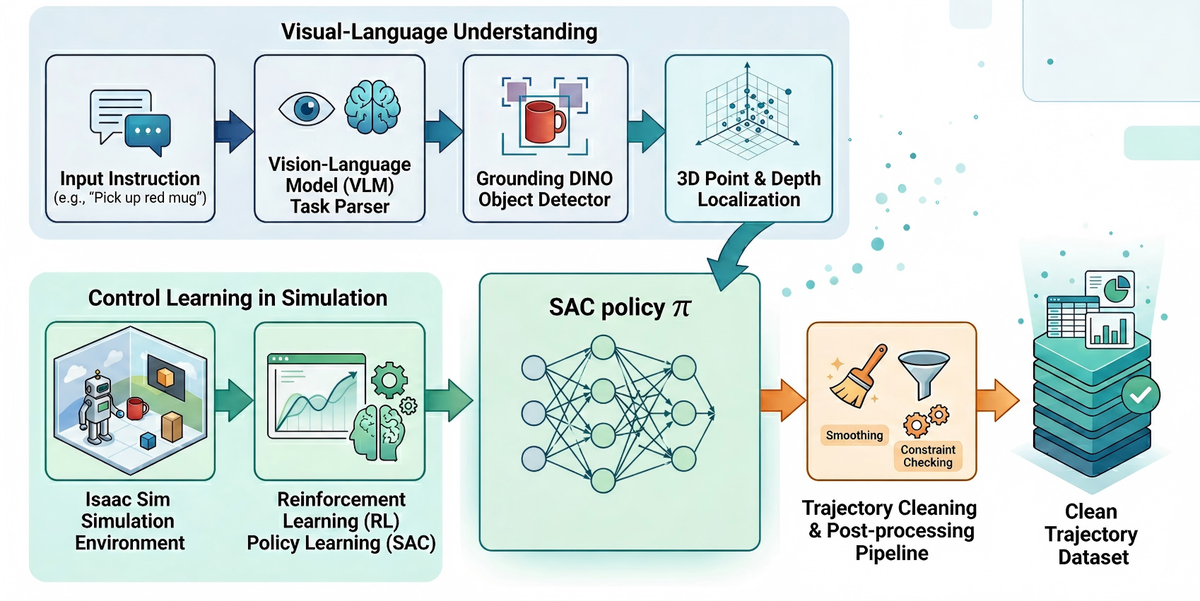
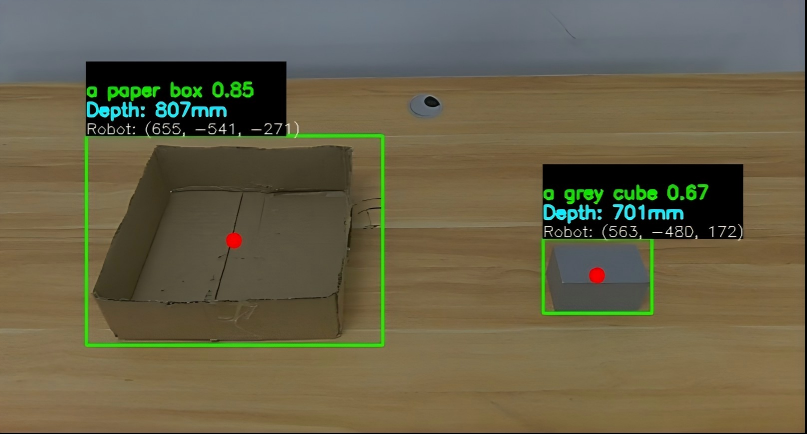
RDGenは、言語指令に基づいてタスクを解析し、オブジェクトを認識・定位し、強化学習ポリシーを用いて軌跡を生成する。主な構成要素には、Qwen3-VLベースのタスク理解エージェント、Grounding DINOによる3Dオブジェクト定位、SACに基づくポリシー学習、そしてシミュレーションから実機への転送機構が含まれる。このパイプラインにより、人間の操作に依存しない高品質な軌跡データを効率的に生成できる。
実験結果
RDGenは、グレーキューブを紙の箱に運ぶタスクにおいて、100%の成功率を達成。人間によるteleoperationと比較して、平均ジューク(jerk)が0.47 m/s³と大幅に低く、より滑らかな軌跡を生成。VLAモデルの学習においても、RDGenで生成されたデータは人間データよりも高い成功率を示した。この結果は、RDGenがロボットの学習に適した高品質なデータを提供できることを示している。
意義・応用可能性
RDGenは、農業ロボットの制御において、人間の介入を減らしつつも高品質な軌跡を生成できるため、農場での自律走行や作物の収穫・運搬などのタスクに応用が期待できる。特に、シミュレーション環境での学習と実機転送の連携により、コストと時間の削減が可能となる。
限界と今後の課題
本研究は、比較的粗い操作タスク(グリッピング・配置)に焦点を当てており、より複雑な操作には適用が難しい。また、シミュレーションと実機のギャップを完全に解消するにはさらなる改善が必要である。今後の課題としては、より多様なタスクへの拡張と、実機での安定性向上が挙げられる。
日本での適用可能性
日本では農業ロボットの普及が進んでいるが、人手不足が深刻な問題である。RDGenは、人間の操作を補助するだけでなく、自動的に軌跡を生成することで、効率的な農業作業支援が可能になる。特に、ハウス農業や温室での作物管理に応用が期待でき、ロボットの導入コストを抑えるとともに、作業の安定性を高める。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: RDGen: Demonstration Generation for High-Quality Robot Learning via Reinforcement Learning – 著者: Zijian Zhu, Menglin Zou, Zhuang Li, Yaojie Tu, Xinhai Sun – 発表日: 2026-05-29 – arXiv ID: 2605.30957v1 – カテゴリ: cs.RO