
魚の行動をAIで分析!水中ロボットの影響を評価する新技術
📄 論文サマリー
著者:Hanne-Grete Alvheim、Stian Mjelde Jakobsen、Martin Føre、Eleni Kelasidi
発表:arXiv(q-bio.QM)/2605.30399v1
公開日:2026年05月28日
✨ 本論文の新規性
- 魚の尾びれを対象とした高精度な3D追跡手法を導入し、従来の魚全体追跡と比較して精度向上を実現
- Stereo VisionとYOLOv8、ByteTrack、SuperGlueを統合したパイプラインを構築し、実際の養殖場での応用に適したシステムを実現
- 魚の動きから速度・加速度・回転角などの行動指標を算出可能にし、魚のストレスレベルを定量的に評価する可能性を示した
論文の主張: 水中養殖場における魚の行動をAIで分析する新しいコンピュータビジョン手法を提案。魚の尾びれを追跡し、ロボットや構造物の影響を定量的に評価。

今回の論文は、養殖場の魚が侵入物体に反応する様子を3D追跡技術で分析するもので、魚の尾びれを重点的に捉える新しいアプローチを採用しています。

なるほど、尾びれを追跡するって、すごく細かな動きが観測できるんでしょうか?
はい、その通りです。YOLOv8とByteTrackを用いた検出追跡システムに、SuperGlueによるフレーム間の一致処理と、三角測量による3D位置推定を組み合わせています。
それって、手作業での評価と比べて精度が上がるんですか?
研究では、既存手法と比較して追跡精度が向上し、魚の速度や加速度、回転角度といった動的データも得られることが示されています。
コストはどのくらいかかるんでしょう?初期投資は大変そうですね。
立体視カメラのセットアップや処理環境にかかる費用は、導入規模によって異なりますが、研究ではデータの前処理や画像補正に工夫がなされており、精度向上に寄与しています。
それって、既存の養殖場に組み込めそうですか?
実際の養殖現場では、環境の影響や魚の動きによるモーションブラーといった課題があります。しかし、論文では工業規模でのデータを用いた分析を行い、その有効性を示しています。
補助金や支援が入れば導入しやすいんでしょうか?
この分野は、IoTやAIの活用が進んでいるため、今後の支援政策の動向も注目されます。特に、技術の実証とコスト効率の改善が求められています。
規模が大きいとROIが見えてくるってことですね。
はい。大規模な養殖場であれば、労働力の削減と魚の健康状態の早期把握が可能になり、長期的には経営の改善に繋がる可能性があります。
技術の進歩は早いですが、現場の実装は慎重に進める必要があるんでしょうね。
まさにその通りです。技術的には進歩していますが、実運用では環境や人材、コストのバランスを取ることが重要です。
背景と課題
養殖業界では、魚の健康と福祉を確保することが重要視されており、特に水中ロボットや構造物などの侵入物体が魚の行動に与える影響を定量的に評価する必要がある。従来の手法では、魚の尾びれの追跡精度が低く、行動の詳細な解析が困難であった。本研究では、魚の尾びれを対象とした高精度な追跡手法を提案し、魚の行動変化をより詳細に評価することを目的としている。
手法・アプローチ
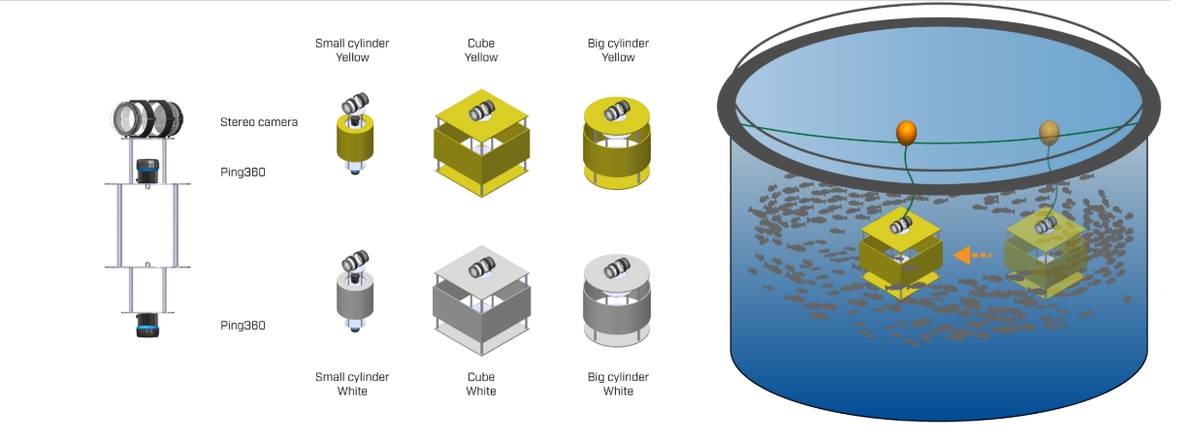
本研究では、Stereo Visionシステムを用いた魚の尾びれの検出・追跡手法を提案。YOLOv8を用いた尾びれの検出、ByteTrackによる追跡、SuperGlueによるStereoマッチング、そして三角測量とRAFT-Stereoを用いた3D位置推定を組み合わせたパイプラインを構築。画像前処理として、モルフォロジー的面積開口法(MO)と離散ウェーブレット変換(DWT)を適用し、魚の尾びれの検出精度を向上させた。
実験結果
実験では、養殖場で異なる形状・色・サイズの構造物に対する魚の行動変化を評価した。結果として、魚は黄色い構造物に対してより近づく傾向があり、大きな構造物に対してはより離れる傾向があることが確認された。尾びれの検出精度は、前処理を施した画像を用いた場合に84.3%を達成し、従来手法と比較して精度向上が確認された。

意義・応用可能性
本手法は、水中ロボットの設計や運用において魚の行動を考慮する際に非常に有用である。魚のストレスレベルを定量的に評価できることで、養殖場の管理や動物福祉の向上に寄与する可能性がある。また、AIを活用した養殖業の自動化・精度向上にもつながる。
限界と今後の課題
本手法は、養殖場の複雑な環境下での実験結果に基づいているため、他の環境(例:淡水養殖場)での適用には課題がある。また、RAFT-Stereoの水中環境への適応性や、より多くの魚の行動指標を導出するためのモデルの拡張も今後の課題である。
日本での適用可能性
日本では、養殖業の自動化・効率化が求められている。本手法は、特に海中ロボットの導入が進む養殖場において、魚の行動をリアルタイムで監視し、安全かつ効率的な養殖管理を実現する可能性がある。特に、尾びれの追跡精度が高く、魚のストレスを早期に察知できるため、養殖業界のスマート化に貢献できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: A Novel Computer Vision Approach for Assessing Fish Responses to Intrusive Objects in Aquaculture – 著者: Hanne-Grete Alvheim, Stian Mjelde Jakobsen, Martin Føre, Eleni Kelasidi – 発表日: 2026-05-28 – arXiv ID: 2605.30399v1 – カテゴリ: q-bio.QM