
視覚的検索の真実を問う「VisualNeedle」:農業画像における細粒度認識の限界を明らかに
📄 論文サマリー
著者:Jingru Chen、Yiming Liu、Mingtao Chen 他5名
発表:arXiv(コンピュータビジョン)/2605.26380v1
公開日:2026年05月25日
✨ 本論文の新規性
- 情報密度の高い農業シーンで、言語的ヒントやグローバル視覚を回避する新しいベンチマークを提案
- ツール使用時の視覚的証拠の依存性を検証するcrop-black設定を導入し、モデルの実際の検索能力を評価
- 農業画像の複雑な構造を反映した300問の質問で、OCR、色認識、空間関係判断など多様な能力をテスト
論文の主張: 農業画像の情報密度が高く、視覚的検索が困難な状況において、従来のマルチモーダルモデルが真の細粒度認識を達成できていないことを示す。ツール使用が視覚的証拠に依存しているかを検証する新しいベンチマーク「VisualNeedle」を提案。

今回の論文は、情報が密集したシーンにおいて、モデルがどのようにして視覚的証拠を探索・活用するかを評価する、VisualNeedleというベンチマークを提案しています。

なるほど、つまり、画像の中の細かい情報に注目する能力を測るテストってことですね?
はい。従来のベンチマークでは、モデルが90%以上の精度を出すことが報告されていますが、これは本当に細かな視覚的証拠を用いているのか、という疑問が出てきます。
なるほど、つまり、言語的なヒントや全体的な意味だけで答えが出せるような仕組みがあるってことですか?
そうなんです。この論文では、言語的な先行知識や、全体的なシーンの意味だけで答えを出すモデルも存在することを指摘しています。
それって、実際の現場では役に立たない気がしますよね。現場では、正確な場所や細かな情報が必要になるじゃないですか。
その通りです。VisualNeedleでは、視覚的証拠を正確に見つけ出す必要があるような、極めて小さな領域に注目する問題を設定しています。
それって、例えば、画像の一部だけを切り取って調べるってことですか?
はい。ツールを使って画像を切り取る操作を模倣した設定で、切り取った部分に実際に情報があるかを確認するテストを行っています。
それって、手動でやるより自動化した方が効率的ですよね。でも、それって技術的に難しいんでしょうか?
技術的には可能ですが、モデルがその切り取った部分を本当に見て、それに基づいて判断できるかという点が鍵です。
そうですね。それって、モデルの判断力がどれだけ正確か、という点に深く関わってくるんでしょうか。
まさにその通りです。評価結果を見ると、ツールを使っても精度は56%程度で、人間の平均は63%となっています。
人間の方がわずかに上回ってるってことですね。これは、技術の進歩がまだ十分ではないってことでしょうか。
その通りです。このベンチマークは、モデルが本当に視覚的証拠を活かして推理できているかを問うもので、技術的な限界が明確に示されています。
背景と課題
近年のマルチモーダル大規模言語モデル(MLLM)は、細粒度画像認識タスクにおいて90%以上の精度を達成するなど、飛躍的な進歩を遂げています。しかし、これらのモデルが実際に画像の詳細な情報を検索・利用しているかは不透明です。特に、質問の言語的ヒントやグローバルな視覚情報が十分に利用されると、モデルは画像を見なくても正解を推測できてしまう可能性があります。本研究では、このような「ショートカット」を排除した、より真の視覚的検索能力を評価するベンチマーク「VisualNeedle」を提案します。
手法・アプローチ
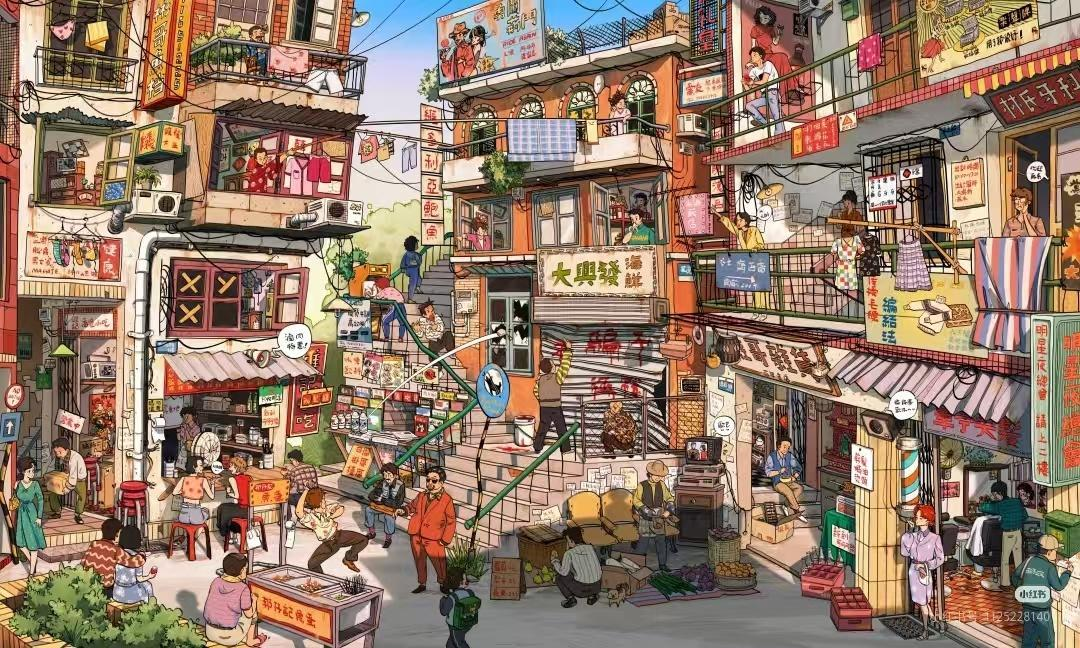
VisualNeedleは、都市の街路灯、密集した書類、棚、地図など情報密度の高い農業関連シーンを対象とし、各質問が「一瞥では見えない」小さな視覚的証拠に依存するよう設計されています。モデルは、画像全体を一度に見ることなく、Cropなどのツールを使って局所的な情報を取得し、それを統合して回答する必要があります。また、ツールの出力が本当に視覚的証拠に基づいているかを検証するためのcrop-black設定を導入し、ツール呼び出しの有無だけでは成功が保証されないことを示しました。
実験結果
9つの主流モデルを用いて評価した結果、no-tool設定ではすべてのモデルが20%以下、最も強力なモデルでも56.01%にとどまりました。一方、人間の多数決精度は63.00%であり、モデルは依然として人間の能力に大きく未達しています。crop-black設定では、ツールの出力が黒画像に置き換えられても精度が大幅に低下し、モデルが実際の視覚的証拠に依存していることを示しました。この結果から、モデルの視覚的検索能力には根本的な限界があることが判明しました。
意義・応用可能性
VisualNeedleは、画像認識モデルの実際の検索能力を評価するための強力なツールです。特に農業現場では、作物の病害や生育状況を正確に把握するために、細粒度の視覚情報の取得が不可欠です。このベンチマークを用いることで、より信頼性の高い視覚的検索モデルの開発が期待できます。
限界と今後の課題
本研究では、視覚的検索の限界を示しましたが、モデルが視覚的証拠を効果的に統合するための手法の開発はまだ未解決です。また、データセットの構築には大量の時間と人手が必要であり、実世界の農業画像に適用するにはさらなる調整が必要です。今後の課題として、よりリアルな農業画像を用いた拡張ベンチマークの構築が挙げられます。
日本での適用可能性
日本では、農業の高度化に伴い、画像認識技術の精度向上が求められています。VisualNeedleのような細粒度認識を重視したベンチマークは、農業機械の自動認識や病害予測システムの開発に活用できます。特に、農業画像の複雑な構造を考慮したモデルの評価が可能となり、実際の現場での応用が期待できます。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: VisualNeedle: Benchmarking Active Visual Search in Information-Dense Scenes – 著者: Jingru Chen, Yiming Liu, Mingtao Chen, Sijie Chen, Richeng Xuan, Liang Yang, Zhichao Hu, Fanyang Lu – 発表日: 2026-05-25 – arXiv ID: 2605.26380v1 – カテゴリ: cs.CV