
ミニトマトやチェリートマトは、収穫期間が長いことに加え、果実1つ1つも小さいことから、多くの収穫省力化技術の検討がなされています。今回はその中でも、チェリートマトを房ごと自動収穫する、ロボットの研究・開発について紹介します。
ミニトマト・チェリートマト収穫の現状
トマトは、野菜の中でも収穫期間が比較的長く、栽培法にもよりますが、4か月~6か月にわたります(1)。このことを現すように、品目別経営統計(ミニトマト)によれば、10a当たりの総労働時間は1311.19時間と比較的長く、収穫作業に355.11時間、調製作業に17.19時間と、総作業時間の28.4%に達します(2)。さらに、ミニトマトやチェリートマトでは、1果房に数十の果実が着果することが多く、適宜熟度を判断しながら、収穫する必要があります。このことから、収穫における省力化技術の導入に関する研究が求められています。
チェリートマトを房ごと収穫する、自動収穫ロボット


北京農業インテリジェント研究センターのグループにより考案された新たな収穫ロボットは、“房ごと収穫できるようにする”、“鉄道車両を応用する”、という大きく2点の特徴を持っています。
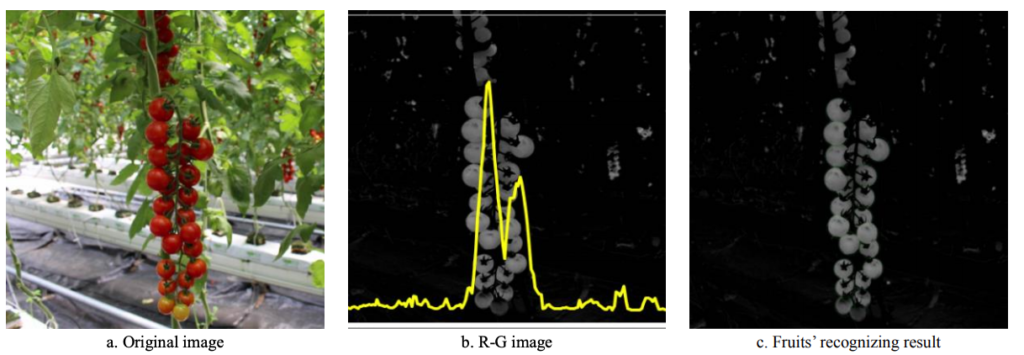
まず、今回の収穫ロボットは、チェリートマトを房ごと収穫することに着目しています。このため、果実を直接つまみ引っ張るような収穫は行えません。そこで本研究では、エンドエフェクタの構造を、剪定ばさみのような形状とし、果房基部の茎を切断することで収穫を行います。


エンドエフェクタ上部についているカメラにより、房ごと収穫できる果房をみつけると、エンドエフェクターの切断部により、果房を茎ごと切断後、そのまま保持し、所定の一時保管場所へと果実を運ぶことが可能な設計となっています。
また、レールの上を移動し、収穫を行うという点も、この収穫ロボットの面白い点であり、レールさえ敷設する場所があれば、多様な環境で使用できる可能性があるのも、大きな特徴です。
実際の収穫試験では、成熟したトマト果房、30果房中25果房の収穫に成功し、この成功率は83%でした。さらに、車両の移動時間を除いた場合、8秒で1果房を収穫することができました。一方、1果房収穫に対する、ロボットの平均収穫試行回数は1.4回でした。すなわちこれは、1回目の試行で収穫に失敗し、2回目、3回目と試行した果房があることを示しています。この原因は、主にエンドエフェクタと、茎の衝突が原因であり、このことを回避するため、エンドエフェクタの改良を行うことが次なる課題であると報告されています。
コメント
今回紹介した、収穫ロボットでは、房ごとチェリートマトを収穫することを可能としました。さらに現段階でも、1果房当たり8秒という比較的早い速度で収穫でき、収穫成功率も8割以上という水準に達しています。このことから、一部人手による収穫もまだ必要ですが、短時間に多数の果実を収穫できるものと考えられ、チェリートマトの収穫において、省力化に大きく貢献できる可能性のある技術です。
一方、本文で紹介されていた果実の収穫例で、房の先端部の果実がまだ十分に着色しきっていないことが気になる部分でした。このことについては、房どり収穫を目的としたトマトの育成例(3)もあることから、実際に導入する場合は、このような品種と組み合わせて導入することで、より高付加価値の果実栽培(果房の基部から先端まで、十分に着色した果実)に繋がるものと考えられます。
今回紹介した論文
Qingchun Feng, Wei Zou, Pengfei Fan, Chunfeng Zhang and Xiu Wang. Design and test of robotic harvesting system for cherry tomato. International Journal of Agricultural and Biological Engineering11(1): 96-100. 2018. CC-BY 4.0.
(今回記事内の“チェリートマトを房ごと収穫する、自動収穫ロボット”およびその他紹介した図表は、上記論文のデータ等を一部抜粋・改変したものを記載しています。)
論文オープンアクセスURL:
https://ijabe.org/index.php/ijabe/article/view/2853
その他参考資料等
- (1)伊藤 正 監修.新版 そ菜園芸.社団法人 全国農業改良普及協会.466ページ.2003.
- (2)農業経営統計調査 品目別経営統計 確報 平成19年産品目別経営統計 年次 2007年 | ファイル | 統計データを探す | 政府統計の総合窓口
https://www.e-stat.go.jp/stat-search/files?page=1&layout=datalist&toukei=00500201&tstat=000001013460&cycle=7&year=20070&month=0&tclass1=000001013649&tclass2=000001020117&tclass3=000001034993
表番号1-15 ミニトマト 分析指標・労働時間(1戸あたり)より - (3)松永 啓. 房どり収穫が可能な短節間ミニトマトの育成. 野菜茶業研究集報(3): 55-59. 2006.
- 野菜茶業研究集報 第3号 | 農研機構http://www.naro.affrc.go.jp/publicity_report/publication/archive/laboratory/vegetea/other/032314.html
- “2.2 房どり収穫が可能な短節間ミニトマトの育成”よりダウンロード可能