
ロボットアームとスペクトルセンシングでストロベリーの甘さを非破壊測定
✨ 本論文の新規性
- RGBとToFセンサを統合したストロベリー検出・定位手法を提案
- YOLOv11sを用いたリアルタイム検出と手先内カメラによる高精度姿勢推定を組み合わせ
- 非破壊の甘さ推定モデルをロボット制御と統合し、実際の農業現場での応用を可能に
論文の主張: 本研究では、ロボットアームに搭載されたRGBとToFセンサを用いて、ストロベリーの位置を検出し、非破壊で甘さを推定するシステムを構築した。実験では88.10%の成功率を達成し、農業現場での実用化が可能であることを示した。

今回の論文では、ロボットアームを用いたRGBとToFセンサーの統合によるイチゴの検出・定位、そして非破壊的な甘さ測定の技術が紹介されています。特に、YOLOv11sを活用したリアルタイム検出と、手先とカメラの位置関係を正確に推定するためのハンド・アイキャリブレーション手法が注目されています。

えっ、イチゴの甘さを非破壊で測れるんですか?それって、実用化の可能性があるんですか?
はい、このシステムでは、イチゴを破壊することなく、その糖度を推定しています。実験結果によると、全体の42試行のうち88.10%が成功しており、検出率は95.24%、接近成功率は100%と、高い精度を示しています。
なるほど、それって、実際の農場で導入できるレベルなんですか?コストや運用の面でどうなんでしょう。
この研究では、主にハンド・アイキャリブレーションの手法比較が行われており、Park法が複数回のサンプルで安定性を示しているとのことです。また、システム全体の統合性や、手動と自動のバランスに関する考察もされています。
手動と自動のバランスって、つまり、完全自動化ではなく、人間の介入も必要だということですか?
はい、ロボットの動きは、事前に定義された経路やウェイポイントに基づいて実行されますが、初期の検出や位置推定には人間の介入も必要になるケースがあるようです。
コストや導入時期、補助金の有無に影響されるんでしょうか。
研究では、システムの再利用性やスケール性についても言及されており、将来的にはVision-Language-Actionモデルとの連携が期待されています。ただ、初期投資は高めであり、補助金の有無によって導入の判断が分かれる可能性があります。
補助金が前提になるんなら、政策変更の影響が大きいですね。
はい、補助金の取り扱いや地域別の支援制度が影響を与えるため、導入の時期や規模によってはリスクが伴うかもしれません。
それって、既存の農業機械との違いはどこなんでしょう?
この技術は、一般的な機械視覚やセンサー融合を活かしており、特定の作物に特化したセンシングと制御が可能になっています。これにより、他の農業機械と連携する際の柔軟性も高いと考えられます。
最後に、この技術、日本で実用化されるには、何が必要になるんでしょうか?
実用化には、コストの削減、運用の簡素化、そして品質の安定性が求められます。また、農業の現場でスケールを拡大するには、労働力の削減効果や市場のニーズを考慮した導入戦略が重要です。
背景と課題
ストロベリーの甘さ(Brix)は消費者の好みと市場価値に大きく影響するが、従来の方法では破壊的サンプリングが主流であり、スケール性に課題があった。また、複雑な環境下での正確な検出や定位も困難であった。本研究では、ロボットアームを活用した非破壊測定システムの構築を目指した。
手法・アプローチ
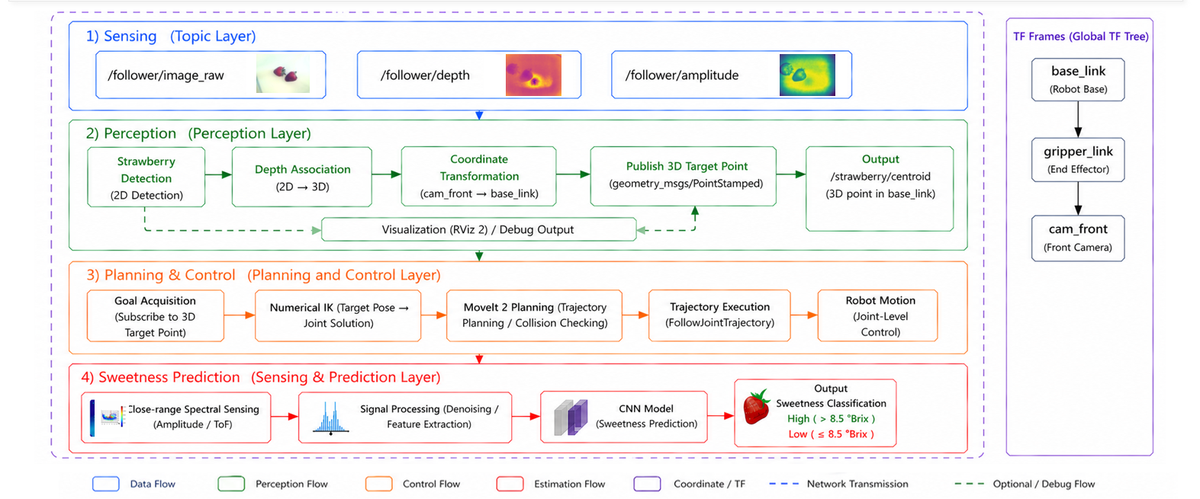
本システムでは、YOLOv11sによるストロベリー検出、RGB-ToFのキャリブレーションとマスクから深度を推定する手法、そして手先内カメラによる手先-カメラ間変換(hand-eye calibration)を用いて、ロボットのベース座標系への位置変換を行う。検出後はウェイポイント探索と閉ループ制御により、センサを最適距離に移動させ、甘さ推定を行う。
実験結果
42回の試行で88.10%の成功率を達成。検出精度は95.24%、検出後のアプローチ成功確率は100%であった。手先内キャリブレーション手法の比較では、Park法がサンプル間の一貫性が高く、ロボット動作の安定性に優れていることが判明した。
意義・応用可能性
本システムは、温室での大規模な品質管理に適しており、従来の破壊的測定に代わる非破壊手段として有望である。また、ロボットアームの再利用性が高く、他の果物への応用も期待できる。
限界と今後の課題
主な限界は、センシング段階における有効領域抽出の難しさであり、特に深度や反射率が難しい条件では精度が低下する。今後の改善には、より高精度な深度推定モデルや、視覚-言語-行動(VLA)モデルとの統合が求められる。
日本での適用可能性
日本では温室でのストロベリー栽培が盛んなため、本システムは実用化が期待できる。特に、高品質な果物の自動選別や、生産性向上に寄与する可能性がある。また、日本農業の自動化推進に貢献できる。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Robotic Arm-Based Spectral Sensing for Strawberry Positioning and Non-Destructive Sweetness Measurement – 著者: Yi Yang, Mark Cardamis, Wen Hu – 発表日: 2026-06-26 – arXiv ID: 2606.28555v1 – カテゴリ: cs.RO