
遠隔操作における力覚ガイドモデルの選定ガイド:垂直農業での実験から得た知見
✨ 本論文の新規性
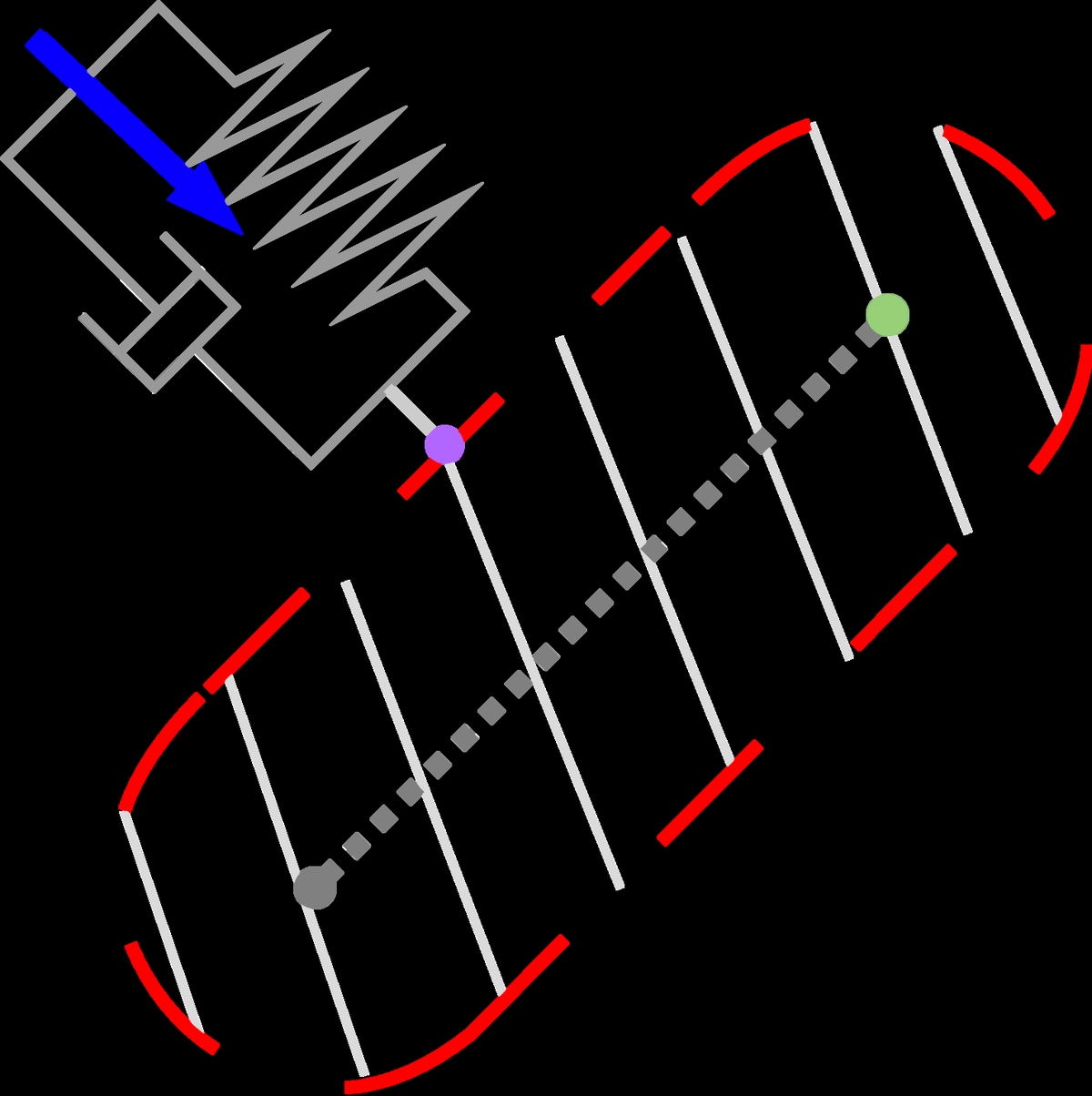
- 力覚ガイドモデルを統一フレームワークで定式化し、比較可能な構造を提供
- 垂直農業環境におけるユーザースタディを通じて、モデル選定の実用的ガイドラインを提示
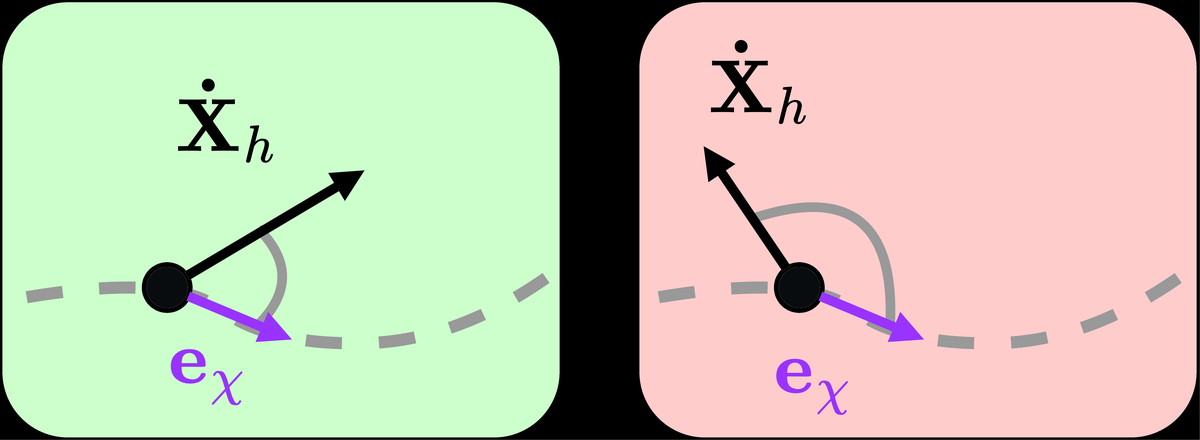
- ガイド力の大きさと快適性・信頼性の相関を定量的に評価し、リアルタイム評価指標を提案
論文の主張: 遠隔操作における力覚ガイドモデルの選定は、タスク・環境・ユーザー特性に依存する。本研究では垂直農業を対象に、3つの代表的なモデル(スプリング・ダンパー、ポテンシャルフィールド、ガイドチューブ)を比較し、それぞれの最適な使用条件を明らかにした。

今回の論文は、遠隔操作における触覚ガイダンスモデルの選定について、実験結果に基づいたガイドラインを提示しています。特に垂直農業の環境を想定して、3つのモデル(スプリング・ダンパー、ポテンシャルフィールド、ガイドチューブ)を比較しました。

なるほど、つまりどのモデルが一番いいって決まってるわけじゃないんですね。環境によって使い分けないと、という話ですね。
そうです。データによると、スプリング・ダンパーは混雑した環境で性能が高く、ポテンシャルフィールドは自由空間では効果的ですが、障害物に近づくとリスクがあると報告されています。一方、ガイドチューブはバランスの取れた選択肢として挙げられています。
それって、例えば水耕栽培の施設の自動化とかに応用できるんでしょうか。コスト面ではどうなんでしょう?
実際の導入では、初期投資の回収期間が長いという課題があります。特に補助金に依存するケースも多いです。研究では、リアルタイムでモデルの選定を可能にするメトリクスを提案しています。
リアルタイム評価って、操作者の体感を数値化するってことですか?
はい、その通りです。ガイド力の大きさと操作者の快適さや信頼感に相関があることが示されています。これにより、操作中のフィードバックをリアルタイムで調整することが可能になります。
それは技術的にも面白いですね。ただ、現場では「何が何でもこれを使いたい」という声も出るかもしれません。他のモデルとの差異が明確になるまで、導入に慎重になるのも当然ですね。
そうですね。技術的には優れた成果ですが、実際の導入に際しては、環境特性や運用体制、コストバランスといった要素を考慮する必要があります。
規模感とかも大切そうですね。大規模な施設と、小規模な実験田では、導入の優先順位も違うでしょうし。
まさにその通りです。研究では、タスク要件や環境特性に応じてモデルを選択するガイドラインを提示しています。これは、現場での適用性を高めるための重要な指針となります。
それはそうですね。あくまで一案として、現場の判断の参考になると思います。
この研究は、触覚ガイダンスをより効果的に活用するための基礎を築くものであり、今後の応用可能性は広いと評価できます。
では、引き続きこの分野の動向も注視していきたいですね。
はい、ありがとうございました。
背景と課題
遠隔操作では、人間の操作者がリモート環境でロボットを制御する技術であり、危険やアクセス困難な場所での作業に有効である。しかし、センサーフィードバックの制限により、操作性能が低下し、認知的負荷が増加する。特に、植物の位置やサイズが動的に変化する垂直農業では、効果的なガイド支援が求められる。本研究では、力覚ガイドモデルの選定に必要な条件を明らかにし、実際の農業環境での応用を目的としている。
手法・アプローチ
本研究では、既存の3つの力覚ガイドモデル(スプリング・ダンパー、ポテンシャルフィールド、ガイドチューブ)を統一された数式で表現し、比較可能な枠組みを構築した。また、ユーザースタディを実施し、6つの異なる環境条件(自由空間、障害物あり、複雑な配置など)で各モデルの性能を評価した。評価指標には、タスク完了時間、最小障害物距離、ガイド力の大きさ、快適性、信頼性など、主観的・客観的指標を用いた。
実験結果
ユーザースタディの結果、どのモデルも環境に応じて最適な性能を示すことが判明した。スプリング・ダンパーは混雑した環境(S4)で優れた性能を発揮し、ポテンシャルフィールドは自由空間(S1)で最も効率的であった。ガイドチューブは全体的にバランスの取れた性能を示したが、タスク完了時間は最も遅かった。特に、ガイド力の大きさと快適性・信頼性の間には強い相関が確認された。
意義・応用可能性
本研究は、農業分野における遠隔操作技術の向上に寄与する。特に、垂直農業のような動的かつ複雑な環境では、適切なガイドモデルの選定が作業効率と安全性を高める鍵となる。この知見は、医療分野の遠隔手術や工業分野の遠隔点検など、他の遠隔操作応用にも応用可能である。
限界と今後の課題
本研究は垂直農業という特定の環境に限定されており、他の分野への適用には注意が必要である。また、ユーザースタディの参加者数が限られているため、より広範な一般向けの評価は今後の課題である。さらに、リアルタイムでのモデル選定に必要な指標の精度向上も今後の研究課題である。
日本での適用可能性
日本の農業現場では、垂直農業の普及が進んでおり、遠隔操作技術の需要が高まっている。本研究のガイドモデル選定基準は、日本におけるスマート農業の実装に直接的に活用可能である。特に、温室での作物管理や病害虫の監視など、人間の介入が難しい場面に効果的である。
📊 本論文の主な指標
参考論文
本記事は以下のarXiv論文を参考に、日本語に解説したものです。詳細は元論文をご覧ください。
– タイトル: Selecting haptic guidance models in teleoperation: guidelines from a comparative user study – 著者: Alexis Boulay, Margot Vulliez, David Daney – 発表日: 2026-06-02 – arXiv ID: 2606.04157v1 – カテゴリ: cs.RO