
今回紹介するナスの自動収穫ロボットは、エンドエフェクターを2つ備えていることが特徴です。一般に、自動収穫ロボットでは、葉などの障害物により、収穫対象物を正しく認識できず、収穫に失敗してしまうことが、1つの大きな課題となっています。今回のロボットは、このような障害物の影響を最小限にできる可能性を秘めています。
ナス収穫の現状
果菜類の栽培において、収穫・調整に要する時間は長く、これはナスでも同様です。品目別経営統計(ナス)によれば、10a当たりの総労働時間は、1049.06時間であるのに対し、収穫時間に325.58時間、調整に75.91時間と、総作業時間の38%に達します(1)。このことから、収穫・調整に関する省力化技術の開発が求められています。
“2つのエンドエフェクターを持つ、ナス自動収穫ロボット”
今回は、スペイン・マドリード工科大学の研究チームによる、ナスの自動収穫ロボットを紹介します。
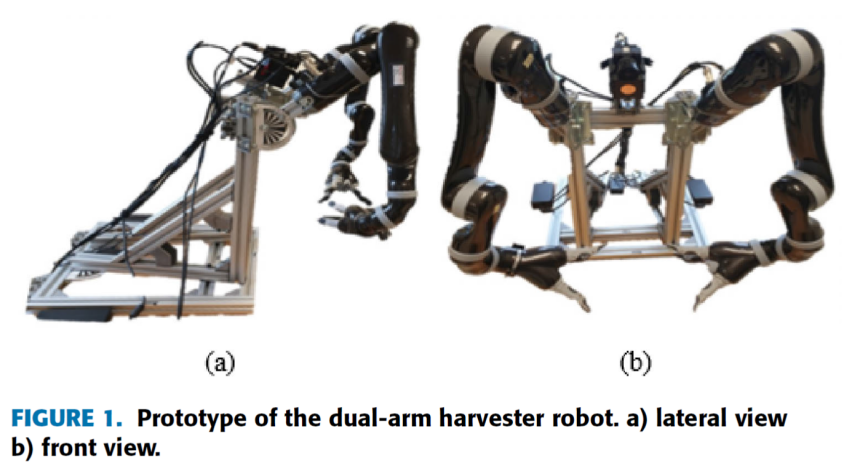
今回のロボットは、エンドエフェクターを2つ備えているため、同時に2つのナスを収穫し、収穫の効率化をはかることが可能となりました。
実際に、エンドエフェクターを1つのみ作動させた場合、2つの果実を収穫するには、83秒要していたところ、2つのエンドエフェクターを同時に作動させた場合、53秒で2つの果実収穫を完了させることができました。なお、単純に倍速にならないのは、エンドエフェクター同士が衝突しあわないよう、チェックするのに時間を要したためと報告されています(表4)。さらに、葉により遮蔽されていない果実については、95%以上の収穫成功率を達成しています。
(表4より:収穫所要時間 InvK=inverse kinematics、エンドエフェクター同士の動作シュミュレーションに時間を要しているのが分かります(One-arm One fruitとDual-arm Two fruitsの比較。))

また、最大の特徴として、2つのエンドエフェクターが協調して作動することで、葉により遮蔽された果実の収穫にも成功しました。
多くの自動収穫ロボットでは、収穫対象の果実が、葉などの障害物により、遮蔽されている場合、正常に認識できず、収穫を行うことができません。今回のロボットでは、2つのエンドエフェクターのうち、1つで葉を押しのけ、残りのエンドエフェクターで収穫を行うというような、動作が可能です。
このように、片方のエンドエフェクターで葉を除けるように運用した場合、81.25%の葉を押しのけることに成功し、そのうち、93.75%で果実収穫に成功したことが報告されています。
コメント
以前、農業先端マガジン(カラーピーマンの収穫ロボット)でも紹介したように、葉による、果実の遮蔽は、自動収穫ロボットの開発において、大きな課題としてあげられており、適宜摘葉することで、果実の収穫成功率が38%から70%へ上昇したことも報告されています(2)。
このような問題に対して、本研究では、2つのエンドエフェクターを用い、人の手の動きをまね、葉を除けるような動作をエンドエフェクターで再現することにより、葉の遮蔽による、果実の認識率向上を達成しました。このような、果実認識率の向上法は、あまり報告がなく、果実認識率の向上に対する、新たな解決法と言えそうです。
また、もう一つの特徴として、2つのエンドエフェクターを、それぞれ独自に作動させることが可能な点もあげられます。自動収穫ロボットの残された課題として、収穫に要する時間が、人間に比べ長いという問題点があります。今回のロボットは、エンドエフェクターの数を増やすことによって、収穫時間の短縮化にも成功しています。そのため、今回の結果は、今後の技術発展に対する、1つの知見となりえるものと考えられます。
今回紹介した論文
DELIA SEPÚLVEDA, ROEMI FERNÁNDEZ, EDUARDO NAVAS, MANUEL ARMADA AND PABLO GONZÁLEZ-DE-SANTOS. IEEE access 8: 121889-121904. 2020. CC-BY 4.0.
(今回記事内の“2つのエンドエフェクターを持つ、ナス自動収穫ロボット”およびその他紹介した図表は、上記論文のデータ等を一部抜粋・改変したものを記載しています。)
論文オープンアクセスURL: https://ieeexplore.ieee.org/abstract/document/9133102
その他参考文献等
- (1)農業経営統計調査 品目別経営統計 確報 平成19年産品目別経営統計 年次 2007年 | ファイル | 統計データを探す | 政府統計の総合窓口https://www.e-stat.go.jp/stat-search/files?page=1&layout=datalist&toukei=00500201&tstat=000001013460&cycle=7&year=20070&month=0&tclass1=000001013649&tclass2=000001020117&tclass3=000001034993
表番号1-13 なす 分析指標・労働時間(1戸あたり)より - (2)Boaz Arad, Jos Balendonck, Ruud Barth, Ohad Ben-Shahar, Yael Edan, Thomas Hellström, Jochen Hemming, Polina Kurtser, Ola Ringdahl, Toon Tielen and Bart van Tuijl. Development of sweet pepper harvesting robot. Journal of Field Robotics 37: 1027-1039. 2020.
https://onlinelibrary.wiley.com/doi/full/10.1002/rob.21937 - (農業先端マガジンでも紹介済み:カラーピーマンの収穫ロボット)。